 Xin-She Yang
Xin-She Yang580 California St., Suite 400
San Francisco, CA, 94104
…
24 pages
The cross-ambiguity function (CAF) relates to the correlation processing of signals in radar, sonar, and communication systems in the presence of delays and Doppler shifts. It is a commonly used tool in the analysis of signals in these systems when both delay and Doppler shifts are present. In this chapter, we aim to tackle the CAF synthesization problem such that the synthesized CAF approximates a desired CAF. A CAF synthesization problem is addressed by jointly designing a pair of waveforms using a metaheuristic approach based on the echolocation of bats. Through four examples, it is shown that such an approach can be used as an effective tool in synthesizing different types of CAFs.
AI








Proceedings of the National Academy of Sciences, 2010
Sonar broadcasts are followed by echoes at different delays from objects at different distances. When broadcasts are emitted rapidly in cluttered surroundings, echo streams from successive broadcasts overlap and cause ambiguity in matching echoes to corresponding broadcasts. To identify reactions to ambiguity in clutter, echolocating bats that emit multiple-harmonic FM sounds were trained to fly into a dense, extended array of obstacles (multiple rows of vertically hanging chains) while the sonar sounds the bat emitted were recorded with a miniature radio microphone carried by the bat. Flight paths were reconstructed from thermal-infrared video recordings. Successive rows of chains extended more than 6 m in depth, so each broadcast was followed by a series of echoes from multiple rows of chains that lasted up to 40 ms. Bats emitted sounds in pairs (“strobe groups”) at short (20–40 ms) interpulse intervals (IPIs) alternating with longer IPIs (>50 ms). For many short IPIs, the stre...
Journal of Computational Science, 2017
Bat Algorithm (BA), is a relatively new nature inspired metaheuristic algorithm, which works on the echolocation capabilities of micro-bats. Although being highly efficient, it suffers from pre-mature convergence. To overcome this limitation, this paper proposes a multimodal variant of BA, called Multi-Modal Bat Algorithm (MMBA), which includes the foraging behaviour of bats. The standard BA exhibits a random movement for catching its prey. This work also proposes an enhancement to these exploration capabilities of bat, called Bat Algorithm with Improved Search (BAIS). Each of these variants is tested for its efficacy against BA over 30 benchmark functions. An integration of both these modifications, the Multi-Modal Bat Algorithm with Improved Search (MMBAIS), is also subsequently compared against the same 30 benchmark functions. Results established the superiority of MMBAIS over BA. Experimental comparison of MMBAIS with a recent variant of BA also revealed the efficiency of MMBAIS.
Physics Procedia, 2010
Parameterization of bats' echolocation signal is essentially based on determination of spectral power density by means of the classic Fourier transform FFT. This study presents an alternative solution in this area of research, that is parametric and nonparametric modelling of short-time signals. The above mentioned methods are based on modelling of white noise with the use of digital filters the transmission of which was set in a way that allows the output signal to be as close to the modelled signal as possible. Proper selection of parameterization method -MA (Moving Average), AR (Autoregressive), ARMA (Autoregressive Moving Average), in respect of the character of signal spectrum (line spectrum, noise) maximally reduces the number of filter coefficients and improves the accuracy of bat's signal modelling. The work also presents the possibility of using the suggested parameterization methods in automatic species identification.
Sonar Systems, 2011
Proceedings of the IEEE, 2000
By using the bat as an example of a cognitive dynamic system, this paper demonstrates how echoic flow fields fit problems, involving guidance, control, and differentiation of targets.
Electronics and Electrical Engineering, 2014
Heuristic optimization algorithms which are inspired by nature have become very popular for solving real world problems recently. The use of these algorithms increases day by day in the literature because of their flexible structures and non-containing confusing mathematical terms. One of these algorithms is Bat Algorithm (BA). BA is a heuristic algorithm based on echolocation characteristic of bats and developed by the mimics of bats' foraging behaviour. In this study exploration mechanism of the algorithm is improved by modifying the equation of pulse emission rate and loudness of bats. The performance of Modified Bat Algorithm (MBA) is verified by 15 benchmark functions and the results were exhibited as comparative. The results of MBA are superior in terms of solution quality on optimization problems compared to BA.
2012
This paper presents a new intelligent algorithm that can solve the problems of finding the optimum solution in the state space among which the desired solution resides. The algorithm mimics the principles of bat sonar in finding its targets. The algorithm introduces three search approaches. The first search approach considers a single sonar unit (SSU) with a fixed beam length and a single starting point. In this approach, although the results converge toward the optimum fitness, it is not guaranteed to find the global optimum solution especially for complex problems; it is satisfied with finding 'acceptably good' solutions to these problems. The second approach considers multisonar units (MSU) working in parallel in the same state space. Each unit has its own starting point and tries to find the optimum solution. In this approach the probability that the algorithm converges toward the optimum solution is significantly increased. It is found that this approach is suitable for...
Biosystems, 2010
Echolocating bats perceive the world through sound signals reflecting from the objects around them. In these signals, information is contained about reflector location and reflector identity. Bats are able to extract and separate the cues for location from those that carry identification information. We propose a model based on Wiener deconvolution that also performs this separation for a virtual system mimicking the echolocation system of the lesser spearnosed bat, Phyllostomus discolor. In particular, the model simultaneously reconstructs the reflected echo signal and localizes the reflector from which the echo originates. The proposed technique is based on a model that performs a similar task based on information from the frog's lateral line system. We show that direct application of the frog model to the bat sonar system is not feasible. However, we suggest a technique that does apply to the bat biosonar and indicate its performance in the presence of noise.
Journal of Comparative Physiology A, 2006
The delay jitter discrimination threshold in bats is a disputed subject. Some investigators have obtained results indicating that bats are able to discriminate alternations in delay down to 10 ns, which appears incredible for purely physical reasons. Using actual bat echolocation sequences recorded during an easy detection task to measure simulated delay jitter, it is shown here that jitter detection thresholds in the order of some tens of nanoseconds are actually physically realizable. However, if the transfer function of the target simulating apparatus is not perfect, the lowest thresholds are in the order of hundreds of nanoseconds and variable between individual bats. This phenomenon is shown to arise as a consequence of the variation in signal parameters from call to call. When the transfer function from a real jitter experiment was artificially applied to the echoes, the jitter detection thresholds again were several hundred nanoseconds. This is the first study to point out a limiting role of the transfer function of a system faced with variations in echolocation signal parameters, something that should be considered in evaluating all sonar systems with variable signal structure.
Studies in computational intelligence, 2020
Bat Algorithm 8.1 Introduction Bat algorithm is an innovative or population-based technique which belongs to the swarm intelligence. It is also referred to as a metaheuristic algorithm developed by Yang [1]. The bat algorithm as a unique algorithm provides a suitable solution technique than numerous and prevalent classical and heuristic algorithms. The algorithm is used for quick decision making and for solving complex problems in diverse fields of operations ranging from engineering, business, transportation, and other fields of human endeavor. It is important to understand the communication and navigational pattern of bats while defining the algorithm since the algorithm is based on the micro-bats echolocation (EL) [1]. EL is an enchanting and captivating sonar propensity produced bats. The appealing wave of sound made by the bats is a great strength they often exhibit while searching for prey. The wave of sound is a formula they adopt not only in food search but serves other purposes [2]. For instance, while searching for food in a completely dark environment, there might be obstacles or dangers on their way to the food source. This can easily be detected in some magical manner as they can sense and discern possible danger on their way to the food source as shown in Fig. 8.1 [3]. The structure and flying position of a bat is shown in Fig. 8.1. BA is therefore a very powerful algorithm as it uses the frequency-tuning methodology for range intensification of the solutions in the population. At the same time, the BA system implements the instinctive skyrocketing or zooming procedure to maintain stability during the food search or exploration process. In developing the BA, the pattern of direction finding, manipulation, and exploration during prey hunting is taken into consideration by mimicking the disparities in terms of emission rates of pulse and intensity of sound released by the bats while hunting or searching for prey. The algorithm demonstrates a high level of efficiency with a distinctive swift start process (Fig. 8.2).
AI
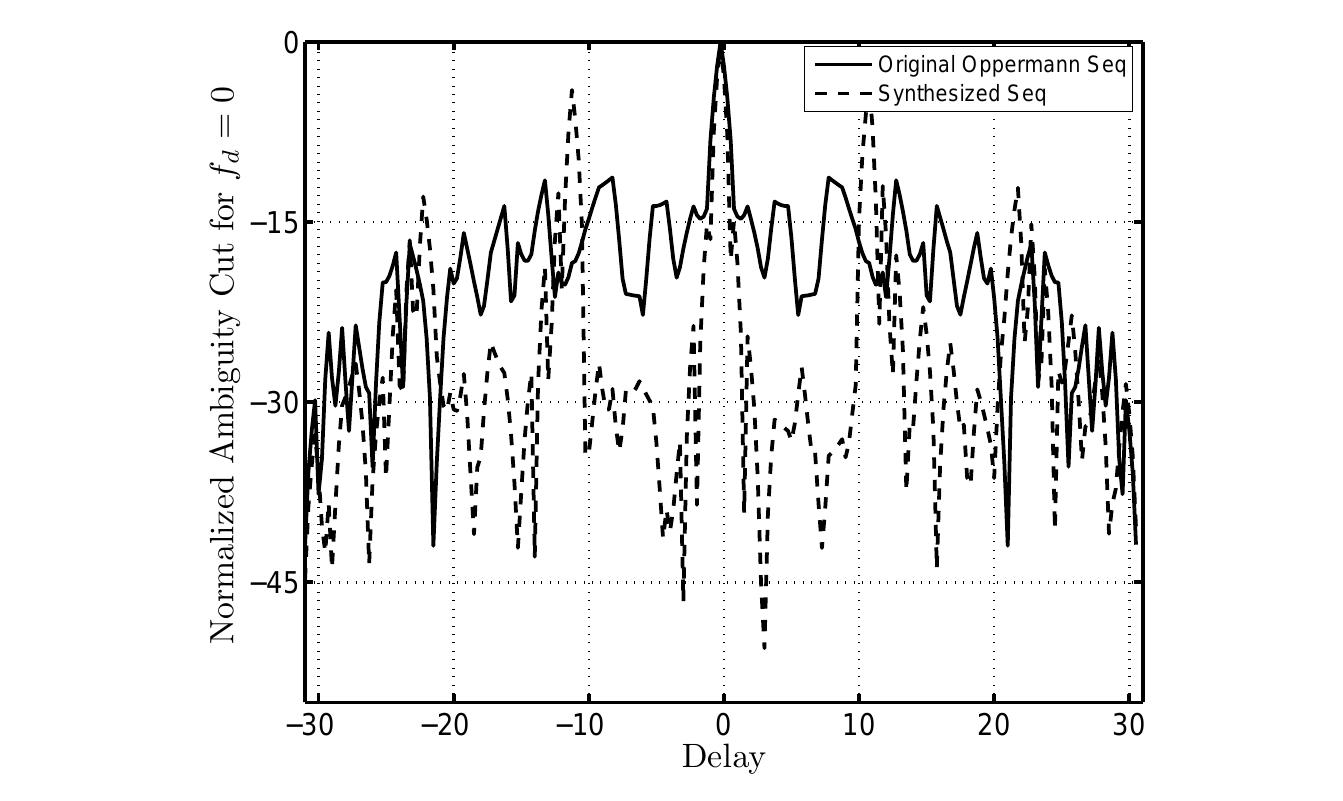
The improved bat algorithm (IBA) effectively addresses the CAF synthesis problem by optimizing joint sequences, enabling the approximation of desired CAF with a clear area around the origin.
The research recognizes CAF synthesis as a global optimization problem, employing nature-inspired metaheuristic algorithms, specifically leveraging Lévy flights for improved exploration and exploitation.
The cross-ambiguity function (CAF) represents the receiver response to mismatched signals, while the auto-ambiguity function (AAF) correlates to matched signals in SISO radar systems.
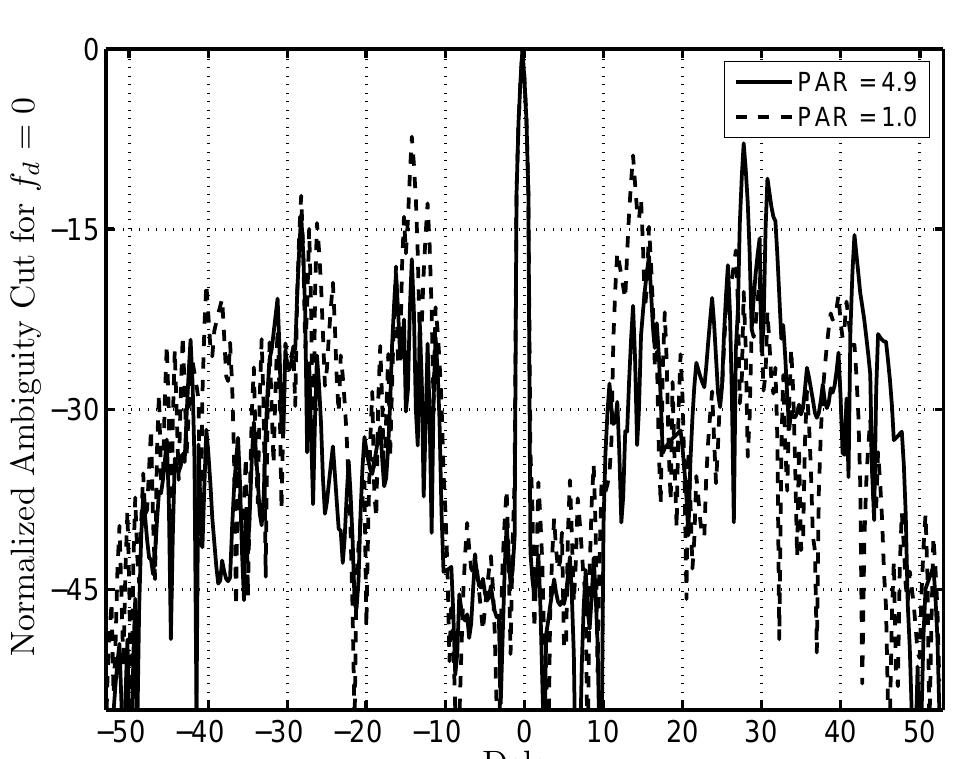
Managing sidelobes is critical in radar applications to prevent signal masking, ensuring accurate detection of main peaks and targets in complex environments.
In Example 2, IBA synthesized a desired CAF with a sidelobe-free area near the origin, achieving low sidelobe levels of -45dB noted for both unconstrained and constrained designs.
2008
We propose to design jointly the waveform and trajectory of a radar mounted on a moving platform, in order to improve the system performance for tracking maneuvering targets. Inspired by bats, we develop an adaptive algorithm that chooses the optimal pulse repetition interval (PRI) and path of the radar. Our method automatically schedules a low PRI when it recognizes that the target executes a maneuvering action. Simultaneously, it selects the radar trajectory which provides the best estimation of the target parameters. We derive our approach under a framework of sequential Bayesian filtering and implement it with a particle filter. We consider a library of target state models associated with different PRI values and use multiple model to schedule the optimal PRI. We apply the posterior Cramér-Rao bound to measure the system performance and decide on the optimal radar path. We demonstrate the advantages of the adaptive radar scheme using numerical examples.
IET Radar, Sonar & Navigation, 2018
Echolocating bats have evolved the ability to detect, resolve and discriminate targets in highly challenging environments using biological sonar. The way bats process signals in the receiving auditory system is not the same as that of radar and sonar and hence investigating differences and similarities might provide useful lessons to improve synthetic sensors. The Spectrogram Correlation And Transformation receiver (SCAT) is an existing model of the bat auditory system that takes into account the physiology and the neural organisation of bats that emit broadband signals. In this paper, we present a baseband receiver equivalent to the SCAT that allows an analysis of target echoes at baseband. The Baseband SCAT (BSCT) is used to investigate the output of the bat-auditory model for two closely spaced scatterers and to carry out an analysis of range resolution performance and a comparison with the conventional matched filter. Results firstly show that the BSCT provides improved resolution performance. It is then demonstrated that the output of the BSCT can be obtained with an equivalent matched-filter based receiver. The results are verified with a set of laboratory experiments at radio frequencies in high Signal to Noise Ratio (SNR).
2017
Introduction Echolocating animals achieve high levels of performance for guidance, orientation, and target finding in surroundings that go from simple, open spaces to densely cluttered scenes. Developing man-made radar and sonar systems that can perform at comparable levels has been an important motivation for studying echolocation from the time of its discovery (Griffin, 1958) to the present (Au and Simmons, 2007; Simmons et al., 2017). The most obvious comparison with man-made systems is with target ranging, determining the distance to an object from the outward and returning travel time of echoes. Figure 1 illustrates the problem of determining target range from echo delay. The earliest theories of echolocation recognized the distinction between a pulse and a chirp to explain target ranging. Inspired by these theories, behavioral studies established that bats do indeed perceive target range from echo delay (Simmons et al., 1995). Furthermore, they exploit the properties of their ...
Proceedings of the National Academy of Sciences, 2020
SignificanceThe wide frequency spectrum of FM bat biosonar sounds enables accurate perception of echo delay (target distance) by contributing numerous delay estimates across frequencies. However, bats require the lowest frequencies in the broadcast to be present in echoes for all higher frequencies to contribute, too. By incorporating this feature into an existing auditory model of FM biosonar, the model can reject echoes that lack the lowest frequencies in the most recent broadcast, thus suppressing echoes of an earlier broadcast that has slightly higher low-end frequencies. This biologically inspired method adopts the bat’s frequency-hopping technique to suppress pulse-echo ambiguity in wideband systems, a serious problem for man-made wideband radar and sonar systems.
2010 International Waveform Diversity and Design Conference, WDD 2010, 2010
Bats achieve remarkable target detection and selection performance in the most challenging environments. These activities are carried out mainly by echolocation, i.e. by transmitting pulses at ultrasound frequencies and processing the echoes from targets. Because they have relied on high level performance for survival, as a consequence of natural selection, it is believed that they have evolved in order to optimise these capabilities. Echolocation calls are very sophisticated, diverse, and commonly composed of a number of harmonic components. If evolution has resulted in multi-harmonic waveforms there might be advantages deriving by doing so. In this paper we simulate multi-harmonics waveforms and exploit advantages or disadvantages by a range analysis of their ambiguity functions. Results are discussed in relation to the radar and sonar case.
The Journal of the Acoustical Society of America, 1998
This study utilized psychophysical data and acoustical measurements of sonar echoes from artificial fluttering targets to develop insights to the information used by FM bats to discriminate the wingbeat rate of flying insects. Fluttering targets were produced by rotating blades that moved towards the bat, and the animal learned to discriminate between two rates of movement, a reference rate ͑30 or 50 Hz͒ and a slower, variable rate. Threshold discrimination performance depended on the rotation rate of the reference target, with a difference value of 9 Hz for the reference rate of 30 Hz and 14 Hz for the reference rate of 50 Hz. Control experiments demonstrated that the bats used sonar echoes from the moving targets to perform the discrimination task. Acoustical measurements showed that the moving target produced a Doppler shift in the echo and a concomitant change in the arrival time of each frequency in the linear period FM sweep. The difference in delay between echoes from moving and stationary parts varied linearly with flutter rate and depended on the characteristics of the bat's sonar sounds. Simulations also showed a reduction in average echo bandwidth with increasing flutter rate, which may account for a higher delay discrimination threshold using the 50-Hz reference rate. This work suggests that Doppler-induced changes in echo delays produced by fluttering targets may contribute to the FM bat's perception of flying insect prey.
Radar applications require sequences with individually peaky autocorrelation. It is a combinatorial problem to obtaining such sequences. So designing a signal above referred is a challenging problem for which many global optimization algorithms like genetic algorithm, particle swarm optimization algorithm, simulated annealing, tunnelling algorithm were reported in the literature. The paper aims at the design of optimal set of Binary Sequences using Modified Bat Algorithm which makes use of Hamming Scan Algorithm for Mutation. The main advantage of Bat algorithm with HSA Algorithm is it enhances the search space of MBA, thereby preventing the local optimum trapping of MBA. The synthesized Binary Sequences using Modified Bat algorithm have better autocorrelation properties than Bat algorithm.